基于EVB-335X-II的ROS(机器人操作系统)下位机开发
时间:10-02
整理:3721RD
点击:
申请理由:因为自己之前用过朋友的Beaglebone Black,在爱板网学习了两个月,包括远程登录、io控制、pwm等,本想把显示屏自己移植上去做个qt的小应用的。看到盈鹏飞有这个活动,赶紧来试试了。邮票孔的核心板我还在淘宝上关注了你们,很不错的哦,有想法。我的优酷地址:http://i.youku.com/u/UMTMwMDYyMjY0
CSDN博客:http://blog.csdn.net/yake项目描述:拿到开发板后,先装上Ubuntu,然后装ROS,读取姿态传感器和碰撞开关的信息,通过TCP/IP与电脑端的上位机通信,检测移动平台的运动状态。移动平台在优酷中有介绍。


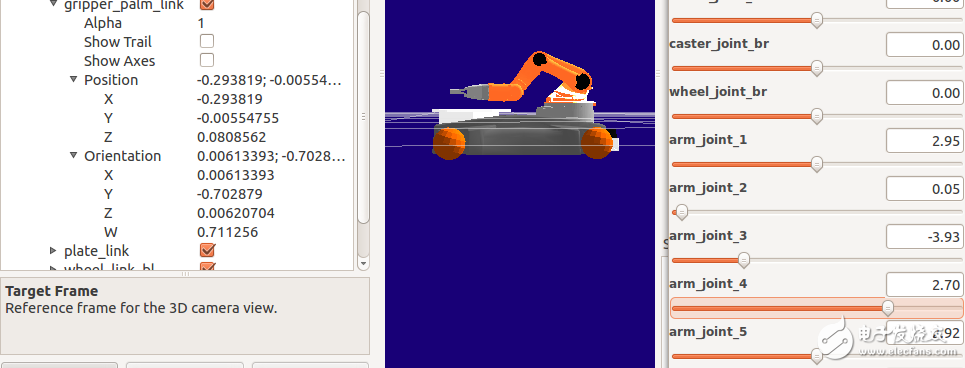
CSDN博客:http://blog.csdn.net/yake项目描述:拿到开发板后,先装上Ubuntu,然后装ROS,读取姿态传感器和碰撞开关的信息,通过TCP/IP与电脑端的上位机通信,检测移动平台的运动状态。移动平台在优酷中有介绍。