智能教室之结项
时间:10-02
整理:3721RD
点击:
用了很长时间的IntoRobot Neutron板,总体来说感觉还不错,板子集成度很高,有关物联网方面的很多传感器都有或者有接口,前段时间因为几个比赛,没时间更新帖子,刚做完一个比赛,赶紧抽时间来写个帖子跟大家分享分享。 用板子和其他传感器做了个智能教室的项目,项目主要是完成对教室内设备的建网智能控制和课堂考勤人数的实现。对设备的智能控制方面,IntoRobot Neutron板子帮了很大忙,并且也使所用的单独的传感器少了很多。
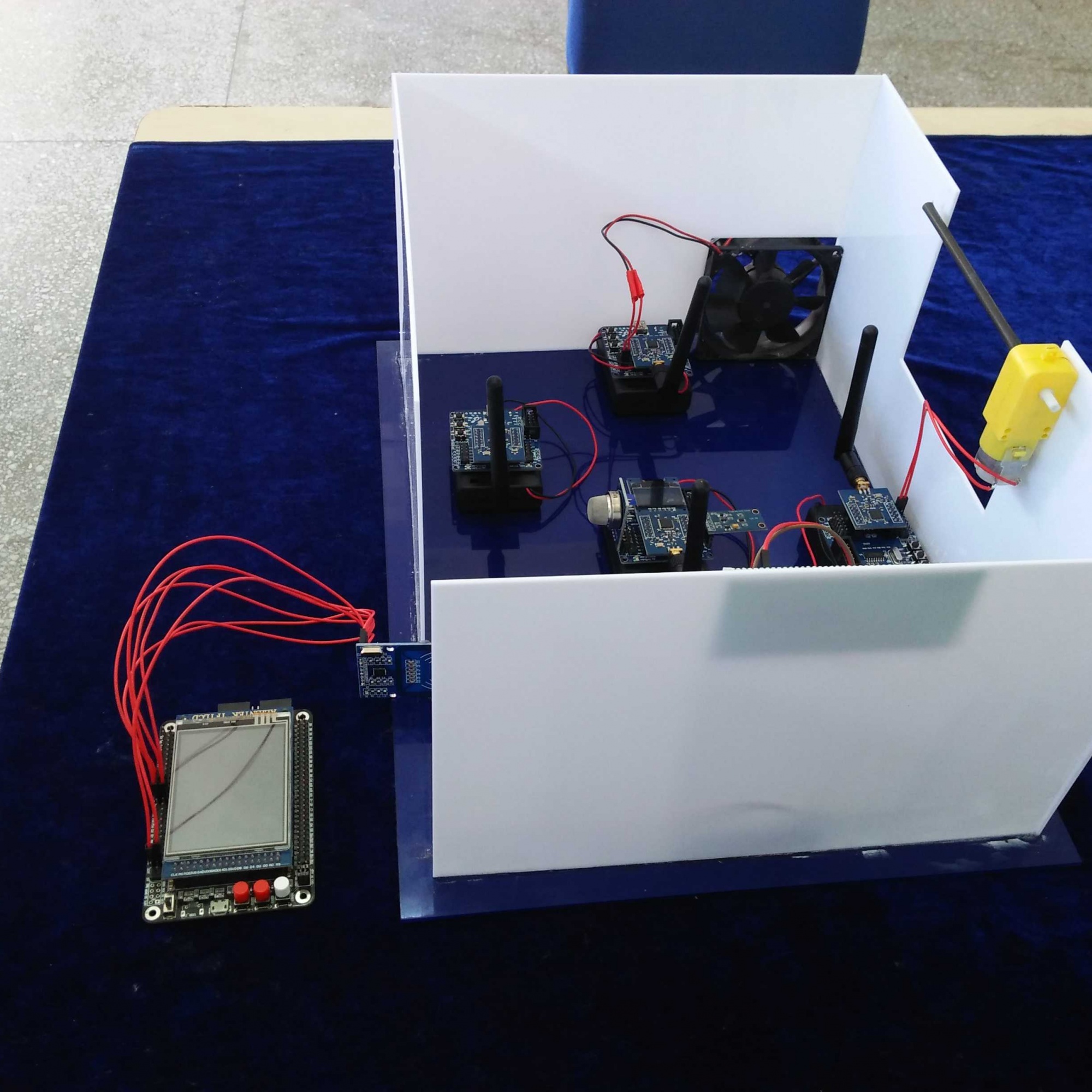
项目是用定做的亚克力板搭建的模拟教室,并在相应的位置安装传感器,以模拟教室内的具体设备并对其进行智能控制。

IntoRobot Neutron板的安装位置所拍的照片上面可能看不太仔细。墙壁上开的凹槽是代表窗户,安装的窗帘,通过教室内的光强等信息智能控制,下面安装一风扇,根据温度控制风扇的转停,IntoRobot Neutron板采集教室内的各种信息,然后传递到CPU控制,以完成对所有设备的智能控制。教室外的显示屏是关于考勤模块的显示屏。
//温湿度传感
void COM(void) // 温湿写入
{
uchar i;
for(i=0;i<8;i++)
{
ucharFLAG=2;
while((!DATA_PIN)&&ucharFLAG++);
Delay_10us();
Delay_10us();
Delay_10us();
uchartemp=0;
if(DATA_PIN)uchartemp=1;
ucharFLAG=2;
while((DATA_PIN)&&ucharFLAG++);
if(ucharFLAG==1)break;
ucharcomdata<<=1;
ucharcomdata|=uchartemp;
}
}
void DHT11(void) //温湿传感启动
{
DATA_PIN=0;
Delay_ms(19); //>18MS
DATA_PIN=1;
P0DIR &= ~0x80; //重新配置IO口方向
Delay_10us();
Delay_10us();
Delay_10us();
Delay_10us();
if(!DATA_PIN)
{
ucharFLAG=2;
while((!DATA_PIN)&&ucharFLAG++);
ucharFLAG=2;
while((DATA_PIN)&&ucharFLAG++);
COM();
ucharRH_data_H_temp=ucharcomdata;
COM();
ucharRH_data_L_temp=ucharcomdata;
COM();
ucharT_data_H_temp=ucharcomdata;
COM();
ucharT_data_L_temp=ucharcomdata;
COM();
ucharcheckdata_temp=ucharcomdata;
DATA_PIN=1;
uchartemp=(ucharT_data_H_temp+ucharT_data_L_temp+ucharRH_data_H_temp+ucharRH_data_L_temp);
if(uchartemp==ucharcheckdata_temp)
{
ucharRH_data_H=ucharRH_data_H_temp;
ucharRH_data_L=ucharRH_data_L_temp;
ucharT_data_H=ucharT_data_H_temp;
ucharT_data_L=ucharT_data_L_temp;
ucharcheckdata=ucharcheckdata_temp;
}
wendu_shi=ucharT_data_H/10;
wendu_ge=ucharT_data_H%10;
shidu_shi=ucharRH_data_H/10;
shidu_ge=ucharRH_data_H%10;
}
else //没用成功读取,返回0
{
wendu_shi=0;
wendu_ge=0;
shidu_shi=0;
shidu_ge=0;
}
P0DIR |= 0x80; //IO口需要重新配置
}
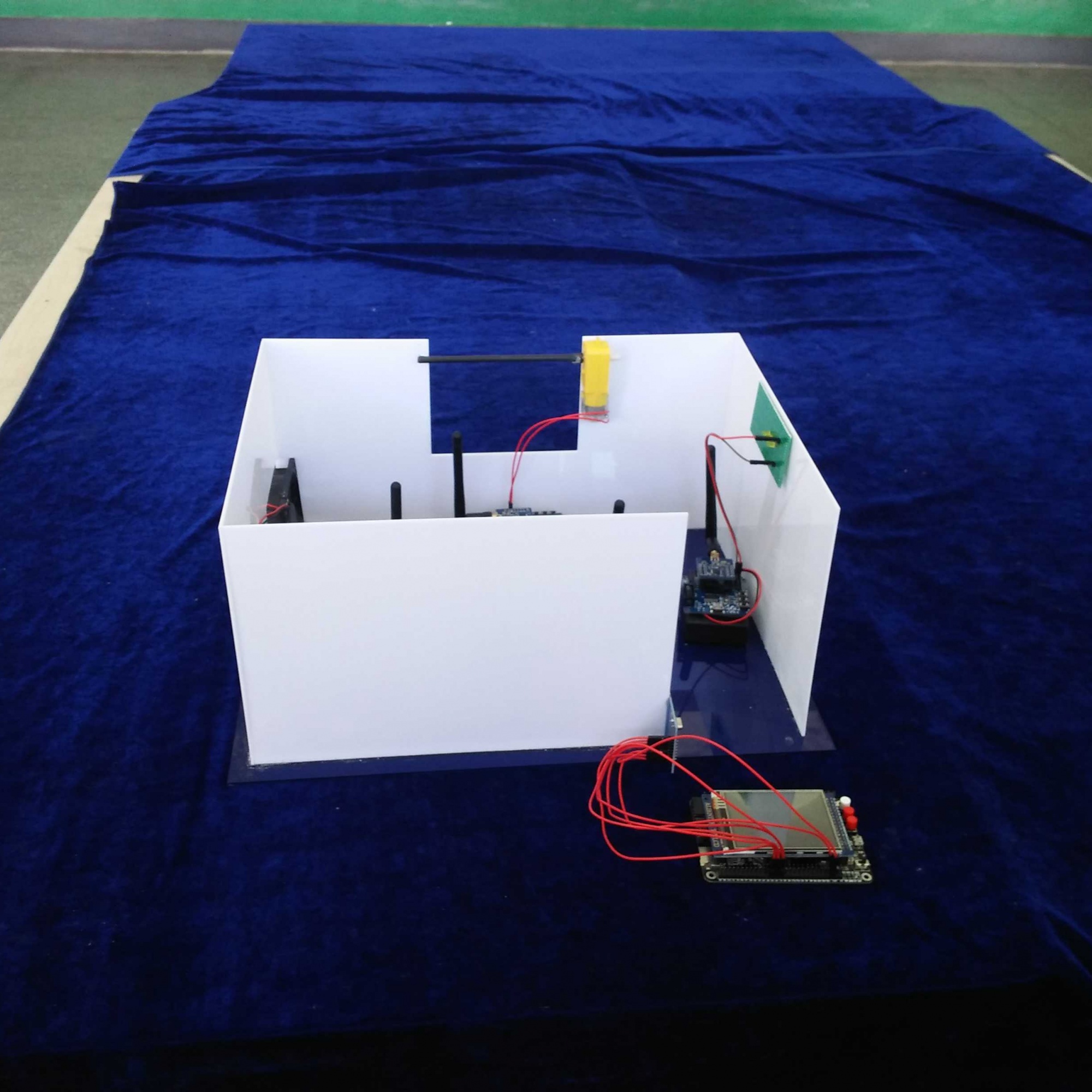
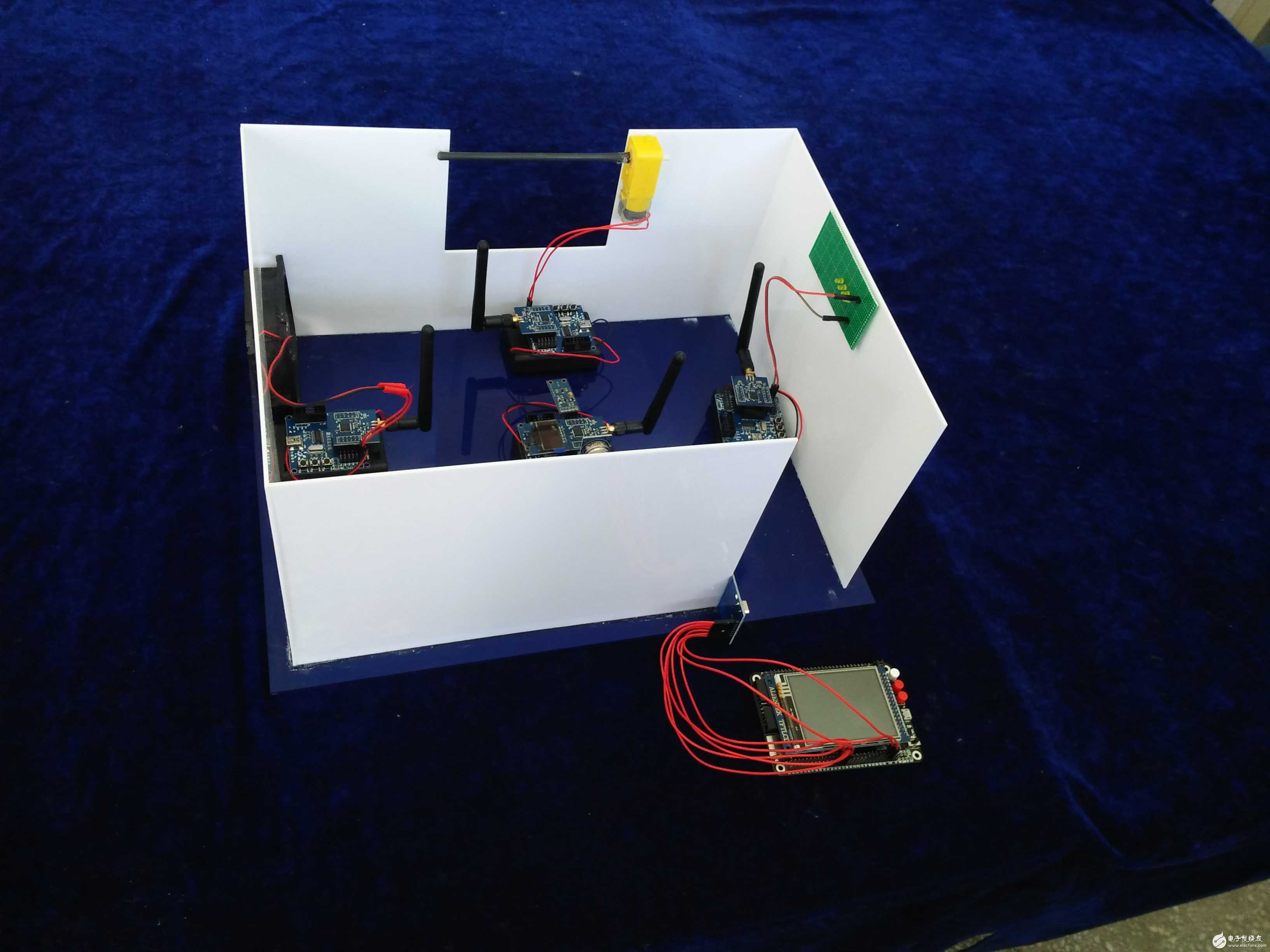
项目是用定做的亚克力板搭建的模拟教室,并在相应的位置安装传感器,以模拟教室内的具体设备并对其进行智能控制。
IntoRobot Neutron板的安装位置所拍的照片上面可能看不太仔细。墙壁上开的凹槽是代表窗户,安装的窗帘,通过教室内的光强等信息智能控制,下面安装一风扇,根据温度控制风扇的转停,IntoRobot Neutron板采集教室内的各种信息,然后传递到CPU控制,以完成对所有设备的智能控制。教室外的显示屏是关于考勤模块的显示屏。
//温湿度传感
void COM(void) // 温湿写入
{
uchar i;
for(i=0;i<8;i++)
{
ucharFLAG=2;
while((!DATA_PIN)&&ucharFLAG++);
Delay_10us();
Delay_10us();
Delay_10us();
uchartemp=0;
if(DATA_PIN)uchartemp=1;
ucharFLAG=2;
while((DATA_PIN)&&ucharFLAG++);
if(ucharFLAG==1)break;
ucharcomdata<<=1;
ucharcomdata|=uchartemp;
}
}
void DHT11(void) //温湿传感启动
{
DATA_PIN=0;
Delay_ms(19); //>18MS
DATA_PIN=1;
P0DIR &= ~0x80; //重新配置IO口方向
Delay_10us();
Delay_10us();
Delay_10us();
Delay_10us();
if(!DATA_PIN)
{
ucharFLAG=2;
while((!DATA_PIN)&&ucharFLAG++);
ucharFLAG=2;
while((DATA_PIN)&&ucharFLAG++);
COM();
ucharRH_data_H_temp=ucharcomdata;
COM();
ucharRH_data_L_temp=ucharcomdata;
COM();
ucharT_data_H_temp=ucharcomdata;
COM();
ucharT_data_L_temp=ucharcomdata;
COM();
ucharcheckdata_temp=ucharcomdata;
DATA_PIN=1;
uchartemp=(ucharT_data_H_temp+ucharT_data_L_temp+ucharRH_data_H_temp+ucharRH_data_L_temp);
if(uchartemp==ucharcheckdata_temp)
{
ucharRH_data_H=ucharRH_data_H_temp;
ucharRH_data_L=ucharRH_data_L_temp;
ucharT_data_H=ucharT_data_H_temp;
ucharT_data_L=ucharT_data_L_temp;
ucharcheckdata=ucharcheckdata_temp;
}
wendu_shi=ucharT_data_H/10;
wendu_ge=ucharT_data_H%10;
shidu_shi=ucharRH_data_H/10;
shidu_ge=ucharRH_data_H%10;
}
else //没用成功读取,返回0
{
wendu_shi=0;
wendu_ge=0;
shidu_shi=0;
shidu_ge=0;
}
P0DIR |= 0x80; //IO口需要重新配置
}
小编有演示视频嘛