使用Neutron实现倒立摆的初步倒立
时间:10-02
整理:3721RD
点击:
板子在手上也有一个多月了,在经过充分的熟悉之后,准备开始着手准备倒立摆项目了。
倒立摆作为倒立摆控制系统是一个复杂的、不稳定的,非线性系统,我做的旋转倒立摆也是四年前2013全国大学生电子设计竞赛的一道赛题,实现倒立是最基本的一个要求。利用IntoRobot Neutron,采集ADC,利用 PWM控制直流电机,利用外部中断,采集编码器脉冲数,定位旋转臂相对位置,便可以实现稳定倒立。
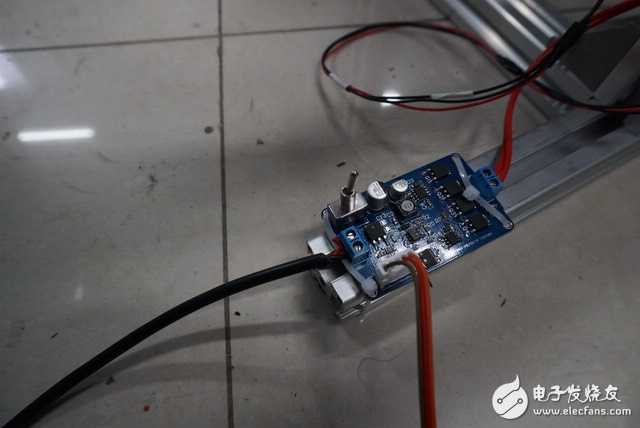
首先从学校的实验室里找来了一个直流电机和铝型材支架。
搭建电路,直流电机驱动,精密电位器,编码器。驱动为全桥MOS驱动,为了参加其他比赛做准备的,驱动这个直流电机还是很轻松的 。精密电位器,作为倒立的杆的信息采集部分,这个的精度一定不能差。编码器,为后续稳定旋转臂留下硬件基础,没什么外围电路,连接到单片机就可以了。

初步实现效果:

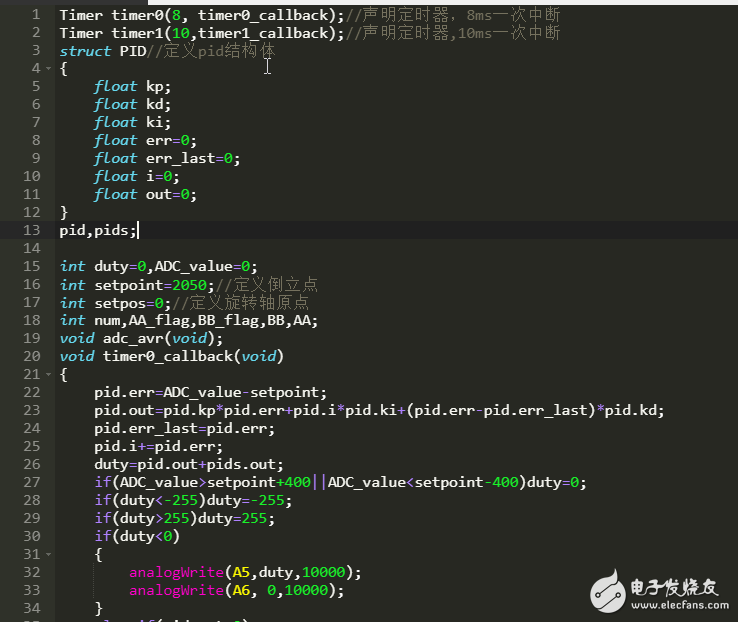
由于Neutron提供了大量的库函数可以调用,所以相当少的代码量就完成了倒立摆的初步倒立,同时由于速度上也远快于arduino单片机,ADC精度,PWM 频率可调范围上也相当有优势,在工程项目实现上自然也基本能够满足各方面的要求。