项目累积小步:IntoRobot控制两路舵机
时间:10-02
整理:3721RD
点击:
购买了两个9g的舵机与光敏传感器5516,开始准备做太能能追日系统。
通过光敏传感器获取光强度信号来调整舵机的经纬旋转。

项目都是一步一步从小做起来的,首先测试舵机的运行。
首先推荐intoRobot官网的示例

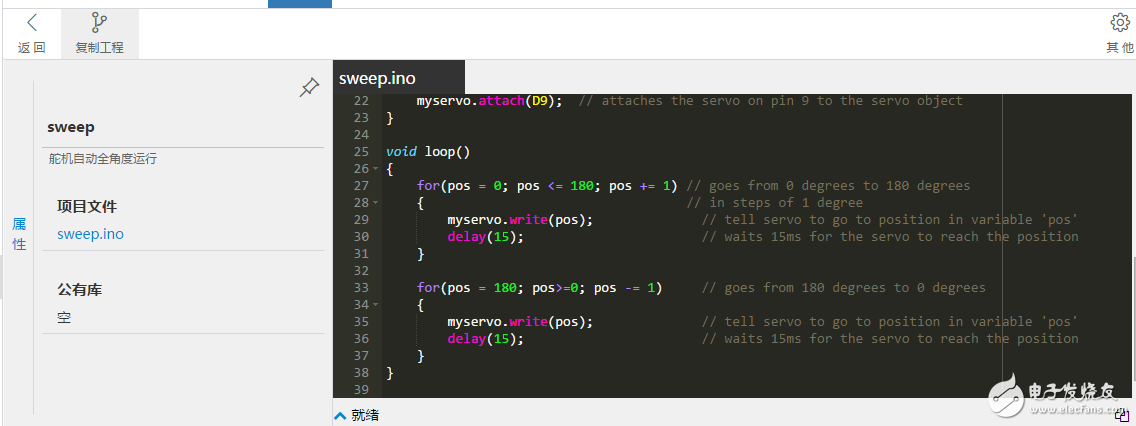
上面是通过D9数字引脚控制舵机0~180°转动的,烧录进入你的设配就可以运行控制了。
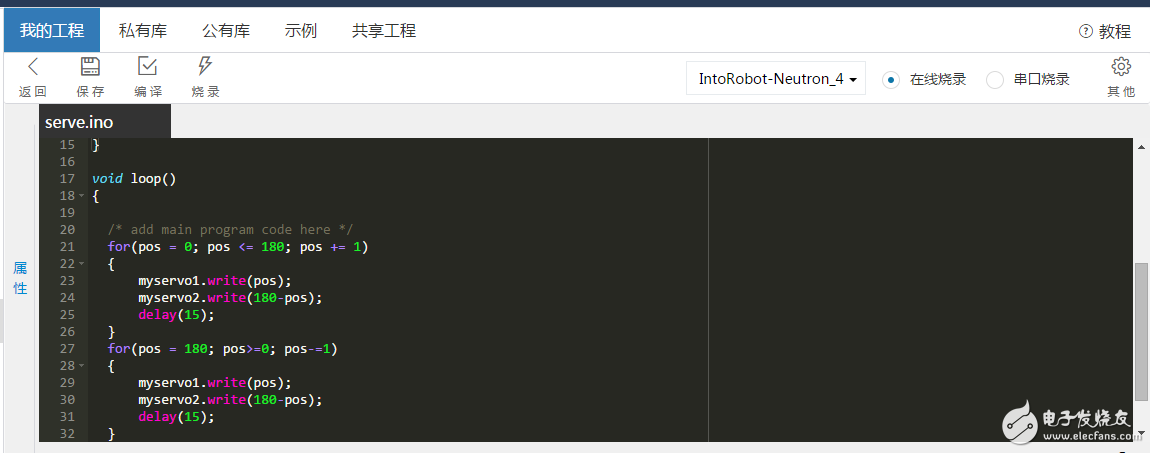
我再这里把程序改成了控制两路舵机的运行,一个正常0至180°,另外一个就是180°至0控制运行
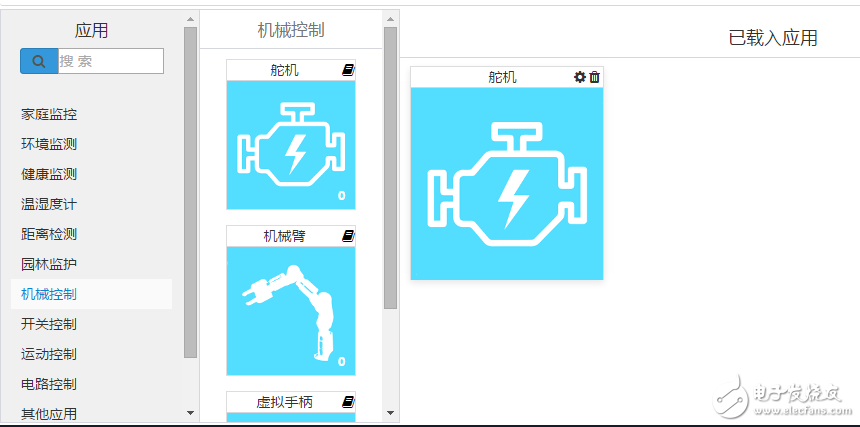
应用暂时采用应用配置中的机械舵机控制
烧录进入设配就运行了,
到这里我们就累积了一小步,下一步是获取光强度值,光信号转变为电信号,再转变为数字信号。
今天暂时到这里,光到数字信号的转变下次讲解
有什么好的想法可以分享留言!
通过光敏传感器获取光强度信号来调整舵机的经纬旋转。
项目都是一步一步从小做起来的,首先测试舵机的运行。
首先推荐intoRobot官网的示例
上面是通过D9数字引脚控制舵机0~180°转动的,烧录进入你的设配就可以运行控制了。
我再这里把程序改成了控制两路舵机的运行,一个正常0至180°,另外一个就是180°至0控制运行
应用暂时采用应用配置中的机械舵机控制
烧录进入设配就运行了,
到这里我们就累积了一小步,下一步是获取光强度值,光信号转变为电信号,再转变为数字信号。
今天暂时到这里,光到数字信号的转变下次讲解
有什么好的想法可以分享留言!