浅谈IntoRobot开发板原理图见解(STM32F411芯片与ESP8266结合的物联网)
时间:10-02
整理:3721RD
点击:
经历过一次固件损坏,痛苦的修复过程后,让我对IntoRobot开发板原理产生了兴趣,分析一下IntoRobot怎么实现它强大的功能。
下面先附上我修复IntoRobot固件的痛苦经历,希望对你有帮助:
http://bbs.elecfans.com/jishu_1131934_1_1.html
下图是官方提供的IntoRobot NeuTron的原理框架图
 在这里可以看出一个很有意思的地方,flash芯片是通过SPI连接在ESP8266芯片上,而没有连接在STM32,
在这里可以看出一个很有意思的地方,flash芯片是通过SPI连接在ESP8266芯片上,而没有连接在STM32,
这是为什么呢,你思考过吗?
下面ESP8266是由乐鑫提供的芯片,安信可再次基础上设计的ESP01物联网模块

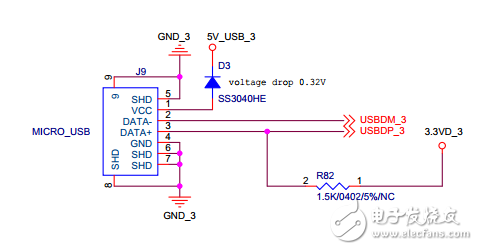
USB接口D+,D-直接与STM32与PA11,PA12(网络端分别为USBDM_3, USBDP_3)
而ESP串口接口通过0R电阻与STM32的PA9 ,PA10相连(具体链接请看下图)
在这里我们可以看出,esp相当把STM32当做TTL装USB芯片模块,省略了TTL_USB模块,减小了体积,且性能也很优秀。
<1>esp的boot位是通过8266_BOOT_3设置,
工作模式:悬空:Flash Boot,
下拉:UART DownLoad,下载模式
这是通过程序控制的。
<2>esp重启引脚通过8266_RST_N_3的连接STM32,当烧录boot时通过高低电平设置esp同步重启
总之,ESP8266引脚与STM32连接,或者引脚悬空但我个人觉得有点可惜,在这里IntoRobot没有把esp8266的引脚引出来,这里仅仅把esp作为模块,
如果esp引出一些引脚,可以把esp作为MCU,运用SOC方案设计那将更加完美。
但这种想法可能需要牺牲开发板的大小。
这里仅仅是个人想法,希望IntoRobot越做越好。
在这里附上安信可官网资料库,大家可以查看对比,对学习物联网将有好处。
http://wiki.ai-thinker.com/
有什么问题可以留言,共同交流成长。
下面先附上我修复IntoRobot固件的痛苦经历,希望对你有帮助:
http://bbs.elecfans.com/jishu_1131934_1_1.html
下图是官方提供的IntoRobot NeuTron的原理框架图
在这里可以看出一个很有意思的地方,flash芯片是通过SPI连接在ESP8266芯片上,而没有连接在STM32,这是为什么呢,你思考过吗?
下面ESP8266是由乐鑫提供的芯片,安信可再次基础上设计的ESP01物联网模块



从上图知道,由于ESP8266没有Programmable ROM,需要外接SPI FLASH存放用户程序

USB接口D+,D-直接与STM32与PA11,PA12(网络端分别为USBDM_3, USBDP_3)
而ESP串口接口通过0R电阻与STM32的PA9 ,PA10相连(具体链接请看下图)

在这里我们可以看出,esp相当把STM32当做TTL装USB芯片模块,省略了TTL_USB模块,减小了体积,且性能也很优秀。

<1>esp的boot位是通过8266_BOOT_3设置,
工作模式:悬空:Flash Boot,
下拉:UART DownLoad,下载模式
这是通过程序控制的。
<2>esp重启引脚通过8266_RST_N_3的连接STM32,当烧录boot时通过高低电平设置esp同步重启
总之,ESP8266引脚与STM32连接,或者引脚悬空但我个人觉得有点可惜,在这里IntoRobot没有把esp8266的引脚引出来,这里仅仅把esp作为模块,
如果esp引出一些引脚,可以把esp作为MCU,运用SOC方案设计那将更加完美。
但这种想法可能需要牺牲开发板的大小。
这里仅仅是个人想法,希望IntoRobot越做越好。
在这里附上安信可官网资料库,大家可以查看对比,对学习物联网将有好处。
http://wiki.ai-thinker.com/
有什么问题可以留言,共同交流成长。