(八)OneNET麒麟座试用
时间:10-02
整理:3721RD
点击:
重新编辑中。
项目概述:物联网平衡车
使用OneNET麒麟座做主控制板,可以通过网络发送命令让小车完成前进和后退等操作,并能通过麒麟座上的温湿度等各传感器采集环境信息,上传到云平台。
硬件设计:
OneNET麒麟座做主控制板制作平衡车,还需要陀螺仪、直流电机、直流电机驱动、电机编码器、小车底盘等外围电路和器件。
外围电路部分的原理图
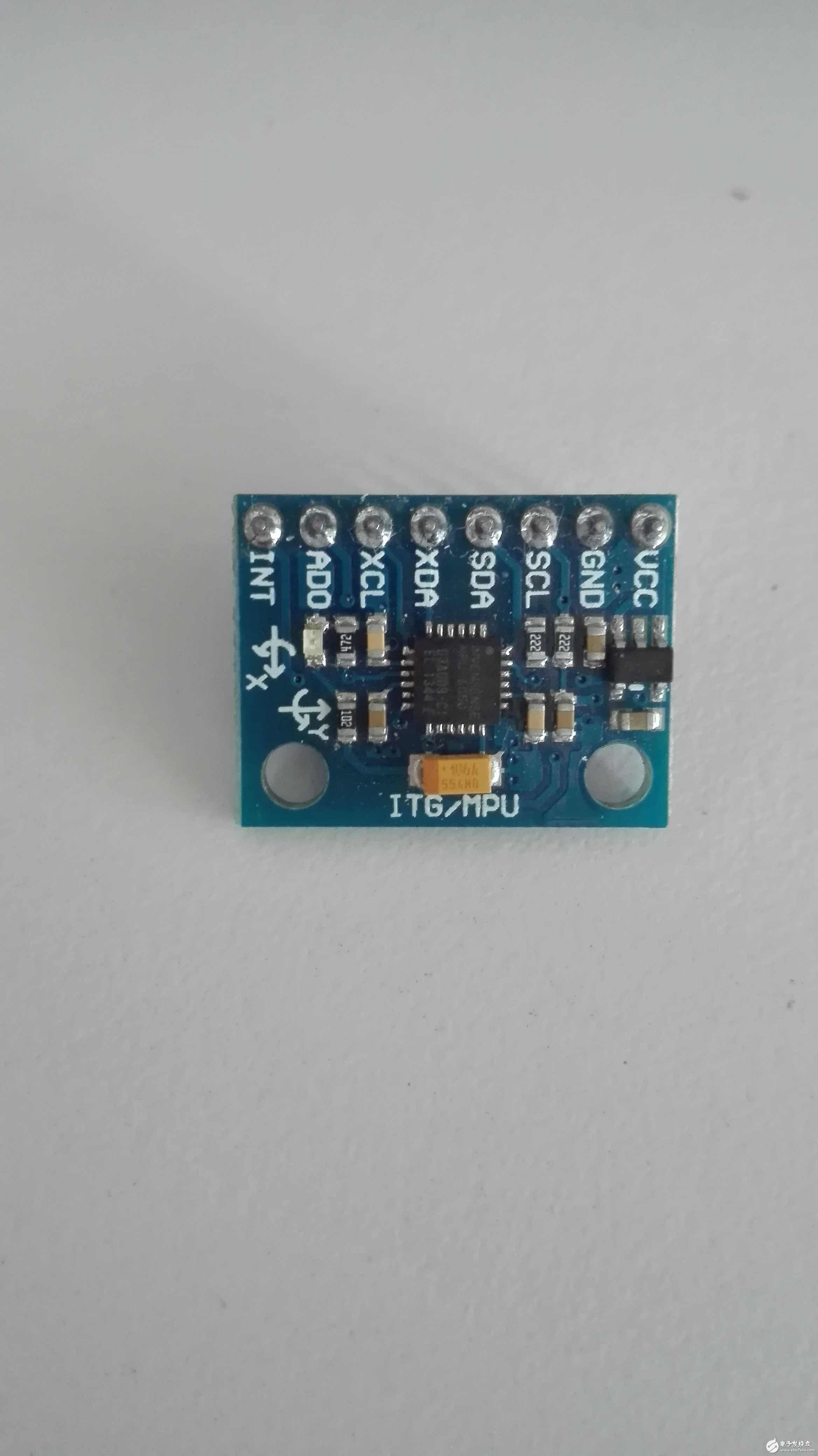
本次使用的陀螺仪为MPU6050
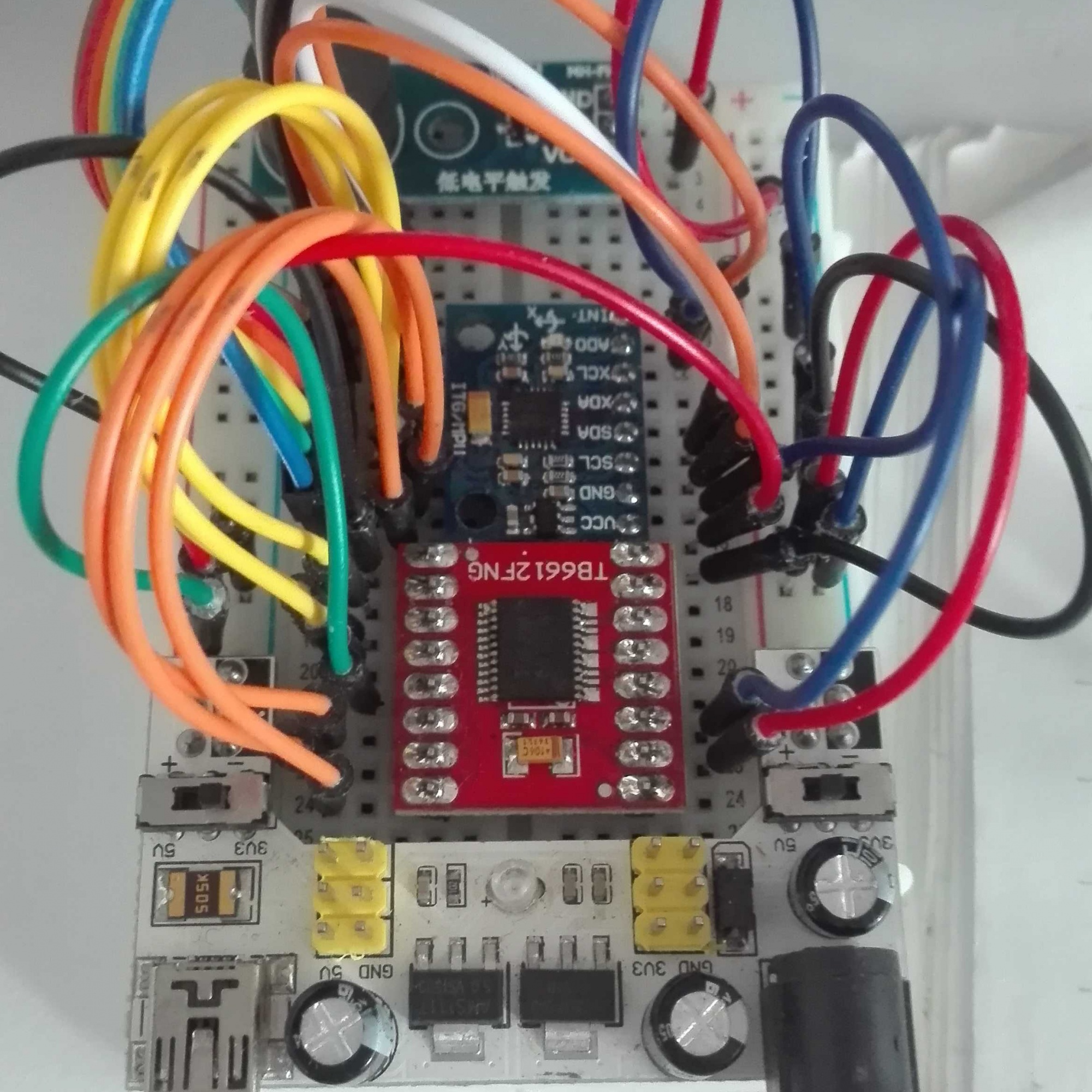
本次使用的直流电机驱动为TB6612

姿态检测与驱动电路安装到面包板上
本次使用的小车底盘
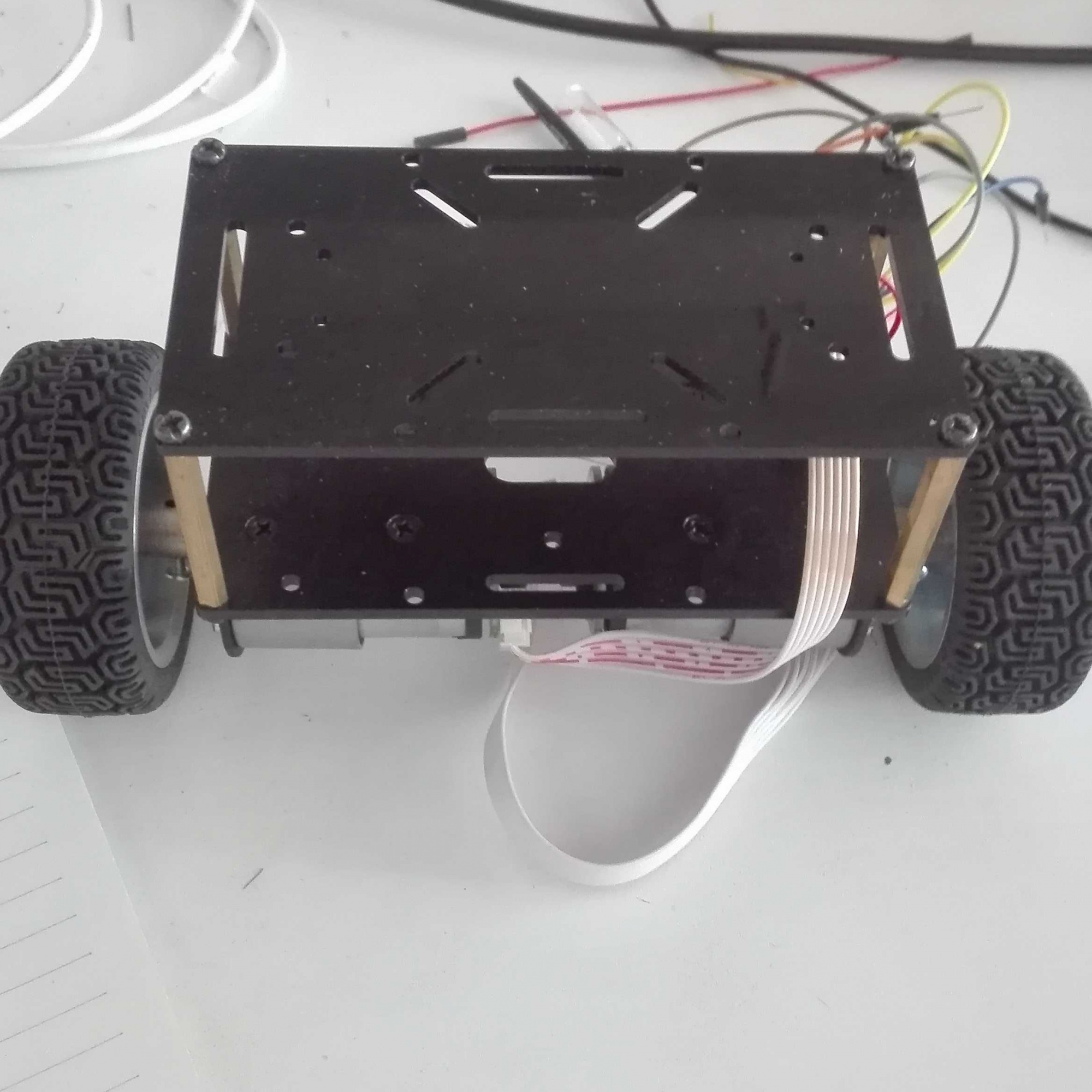
组装起来,麒麟座开发板有点大啊

目前以更新了:开箱赏析
中移物联云平台体验,HTTP协议数据上传到云端
编写两轮平衡车菜单界面
FreeRTOS系统的移植
读取 MPU 6050
读取直流电机编码器
速度和转向PID控制
菜单界面里面可以显示PID参数,调试控制程序的时候方便观察。可以通过切换菜单查看显示麒麟座板子上的温湿度等传感器的数据,这部分功能可以根据需要来添加,菜单界面属于实时性要求很低的程序,比较简单。
FreeRTOS系统和uCOS II系统以及ARM自己出的 RTX系统挺像的,后面有机会,继续深入使用这个系统,顺便把使用过程也开帖分享一下。
MPU6050的原始数据的读取,采用了软件模拟 IIC,也试过DMA方式读取,效果不错但是有个BUG没调试好,回头继续研究。
目前先结个项吧,PID控制还没调好,后面继续更新。