MPPT算法之三点跟踪法
时间:10-02
整理:3721RD
点击:
三点法又叫滞环比较法。是在扰动观察法的基础上提出来的一种跟踪方法。因为扰动法两点比较,即目前的工作点与上一个扰动点比较,判断功率的变化方向从而决定工作电压的移动方向,除了造成较多的扰动损失外,还可能发生误判。针对太阳日照量并不会快速变化的特点,多余的扰动可能带来较多的损失。滞环比较法可在日照量快速变化时并不跟随著快速移动工作点(也许只是干扰或判读错误),而是在日照量较稳定时再跟踪到最大功率点,以减少扰动损失。其原理详述如下:

考虑太阳能电池P-V特性曲线,在曲线顶点附近任意取三个点不同位置,可以得到上图的这5中情况。设定一个标志位flag,C点和B点比较,如果其中C点比较大或与B点相等,则flag=1;如果B点较小,则flag=-1;而A点与B点进行比较有些不同,当A点比B点大或者相等时,flag=-1;如果A点比B点小时,flag=1.当三点比较完之后,flag=2,(上图中第一种情况)工作电压扰动D值应往右移动;当flag=-2(上图中的第三种情况)D值应往左边移动;当flag=0(上图第二种情况)表示到达顶点,D值不发生改变在A,B,C三点功率的检测上,先读取B点的功率为基准点,增加一个△D读取C点功率,再减少两倍的△D读取功率值作为A值。连续检测三点功率值后在比较大小计算权位值,由权位值来判定基准点应该往C点移动,A点移动或者不移动。
当照度正在变化时,扰动D又与A,B,C三点位置与flag值与上图有些不同,可能出现下图这些情况。
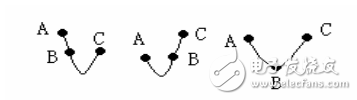
上图三种排列方式在照度快速变化时可能会出现,但 Tag 值都设置为零,即工作点并不会移动。这样就能有效的避免在最大功率点附近因扰动造成的功率损失,当光强发生突变时,不盲目移动工作点,等日照稳定后在追踪。
考虑太阳能电池P-V特性曲线,在曲线顶点附近任意取三个点不同位置,可以得到上图的这5中情况。设定一个标志位flag,C点和B点比较,如果其中C点比较大或与B点相等,则flag=1;如果B点较小,则flag=-1;而A点与B点进行比较有些不同,当A点比B点大或者相等时,flag=-1;如果A点比B点小时,flag=1.当三点比较完之后,flag=2,(上图中第一种情况)工作电压扰动D值应往右移动;当flag=-2(上图中的第三种情况)D值应往左边移动;当flag=0(上图第二种情况)表示到达顶点,D值不发生改变在A,B,C三点功率的检测上,先读取B点的功率为基准点,增加一个△D读取C点功率,再减少两倍的△D读取功率值作为A值。连续检测三点功率值后在比较大小计算权位值,由权位值来判定基准点应该往C点移动,A点移动或者不移动。
当照度正在变化时,扰动D又与A,B,C三点位置与flag值与上图有些不同,可能出现下图这些情况。
上图三种排列方式在照度快速变化时可能会出现,但 Tag 值都设置为零,即工作点并不会移动。这样就能有效的避免在最大功率点附近因扰动造成的功率损失,当光强发生突变时,不盲目移动工作点,等日照稳定后在追踪。
能分享代码更好哦
只是这个算法的代码很好写的,关键是看控制精度,效率,跟踪时间的要求