关于四旋翼无人机的悬停中姿态检测及解算中的一些知识
时间:10-02
整理:3721RD
点击:
因为毕业设计是关于四旋翼无人机目标跟踪的相关内容,这几天一直在看相关的内容。其实,这是一个挺复杂的项目,因为涉及的东西太广泛,其实就是太杂太多。我自己将他主要分成三块:
1.视频的跟踪:这部分主要是云台的稳定问题,保证视频图像的稳定性,给下一步识别提供一个清晰准确的目标;
2.目标识别问题:这一部分就要涉及各种目标识别算法,特征提取等方面的内容;
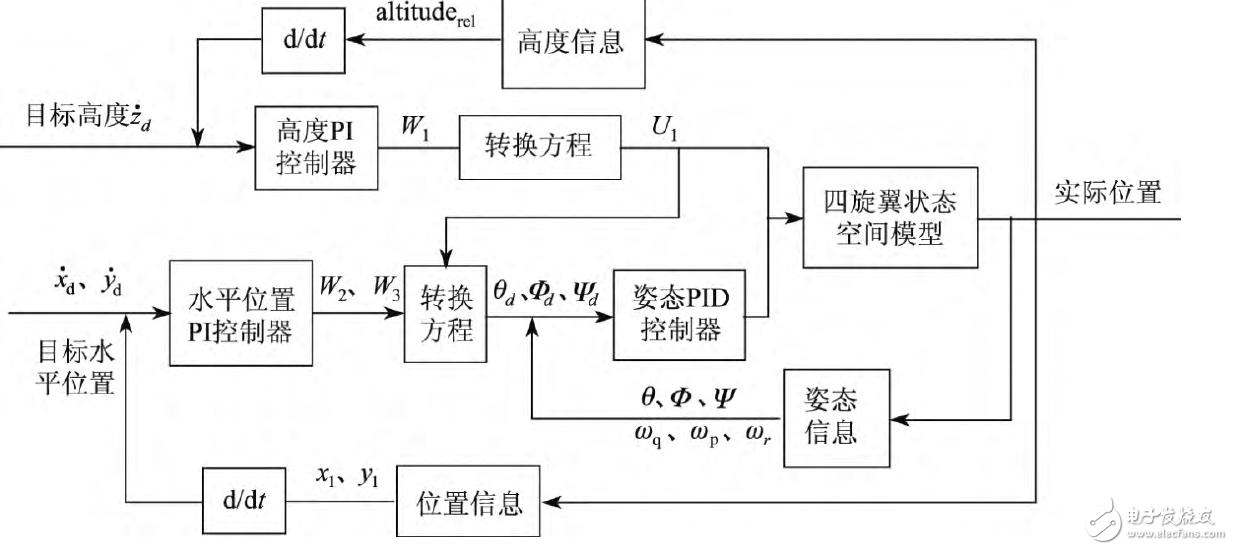
3.飞控系统:这一部分就是姿态的解算以及电机的相关控制问题,包括完成相关的悬停等。
其实单独来看各个部分,都已经有产品问世,但是将其组合到一起来实现无人机的目标跟踪还是十分有难度的。也就是像大疆这样的nb公司才会有那么快的更新速度。
这一帖主要是说关于飞控部分的姿态控制问题。涉及到飞控一定会有姿态这个问题,通过看一些论文,发现大家广泛采用MPU6050这个东西,但是只用这个东西还不行,应该加上高度计,GPS模块和电子罗盘才行,这样才能够较为精确的得到飞行器的高度和水平位置信息。软件方面,姿态解算肯定首选卡尔曼滤波,但是在高度和水平位置这一块,卡尔曼滤波就不一定是最合适的了。对于高度测量由于是根据高度计和GPS两个传感器的数值进行融合得到,而两者的更新时间差距较大,卡尔曼滤波的优势就不是很明显,而互补滤波算法的处理时间则短得多,处理后的数据精度与卡尔曼滤波算法的精度相差无几,采用胡波滤波的方法。对于水平位置测量,则用电子罗盘对GPS的信息进行校正,提出双传感器融合算法.这样的的无人机的位置和姿态信息相对准确,通过协同作用,为pid算法提供相关电机调节参数。这些大概就是这一段时间的想法。
1.视频的跟踪:这部分主要是云台的稳定问题,保证视频图像的稳定性,给下一步识别提供一个清晰准确的目标;
2.目标识别问题:这一部分就要涉及各种目标识别算法,特征提取等方面的内容;
3.飞控系统:这一部分就是姿态的解算以及电机的相关控制问题,包括完成相关的悬停等。
其实单独来看各个部分,都已经有产品问世,但是将其组合到一起来实现无人机的目标跟踪还是十分有难度的。也就是像大疆这样的nb公司才会有那么快的更新速度。
这一帖主要是说关于飞控部分的姿态控制问题。涉及到飞控一定会有姿态这个问题,通过看一些论文,发现大家广泛采用MPU6050这个东西,但是只用这个东西还不行,应该加上高度计,GPS模块和电子罗盘才行,这样才能够较为精确的得到飞行器的高度和水平位置信息。软件方面,姿态解算肯定首选卡尔曼滤波,但是在高度和水平位置这一块,卡尔曼滤波就不一定是最合适的了。对于高度测量由于是根据高度计和GPS两个传感器的数值进行融合得到,而两者的更新时间差距较大,卡尔曼滤波的优势就不是很明显,而互补滤波算法的处理时间则短得多,处理后的数据精度与卡尔曼滤波算法的精度相差无几,采用胡波滤波的方法。对于水平位置测量,则用电子罗盘对GPS的信息进行校正,提出双传感器融合算法.这样的的无人机的位置和姿态信息相对准确,通过协同作用,为pid算法提供相关电机调节参数。这些大概就是这一段时间的想法。