基于单片机的LED创意红外线遥控数字时钟
时间:10-02
整理:3721RD
点击:
在网上看到不少老外做的各种旋转LED显示屏,非常COOL,我也动手用洞洞板试做了一个类似的显示屏,结果感觉还不错。于是再接再励继续努力,将作品进一步改进,完善后制成如今这个样子。
由于刚学51单片机,加上制作电路板软件也是从零开始,的确花了我不少的时间和精力。不过也就是在这艰难的独立制作中,真正学到了不少实在的东西。
本项目的关键是如何解决高速旋转的电路板如何供电,如何调时的问题。我采用电机电刷的原理,将旋转轴钻空,通过一只插头将电源的从反面引到前面的电路板上,而这个旋转的插头又与固定在背板上的两个铜片接触的。调时的问题有些困难,一是让电路板在旋转前与PC机相接,由电脑传送调时数据,这虽然可行但不方便。还有就是用遥控方法,但此方案在调试方面有很大的困难。
显示方式上,我采用平衡式的两排LED,这除了在旋转时能较好的保持平衡外,主要能利用两边交替显示方式,比单排要快一倍。
本装置不仅是一个时钟,它还可以动态显示汉字及图案,这就看如何发挥了

其具体制作过程如下:
一。旋转电机的制作
从制作成本与方便考虑,选用旧电脑用的大软驱上的直流无刷电机,只是对局部进行改造。

就是这种古董软驱

软驱上的直流无刷电机
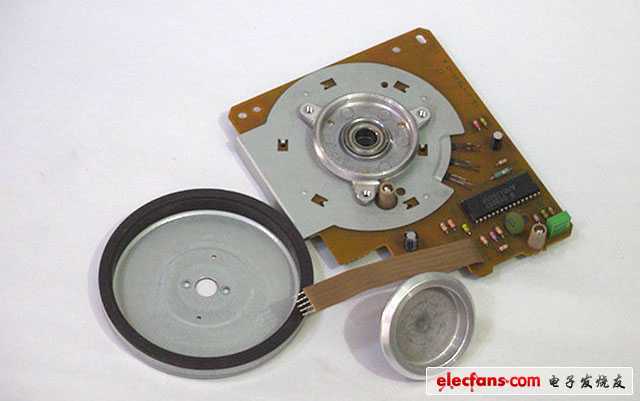
拆开后的电机
仔细拆开直流电机,将带圆盘的铝轴从中开孔,让它刚好能插入一个插头。
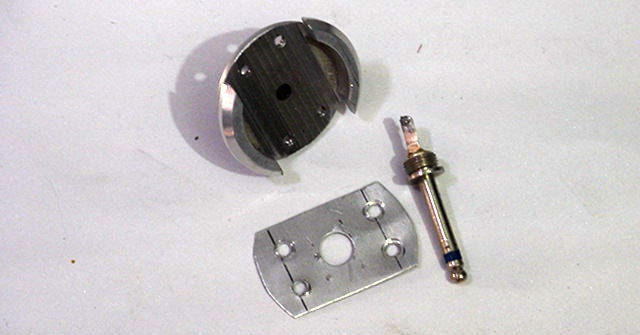
将旋转轴加工成这样

装配好以后
按拆开时的顺序,反序将轴安装直流电机上。

电机装配完成后
用两片铜片做的电刷

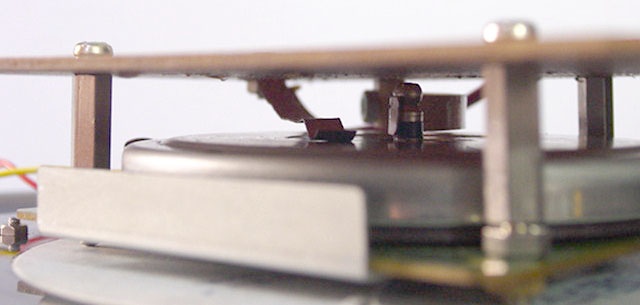
电刷装好后的侧面图
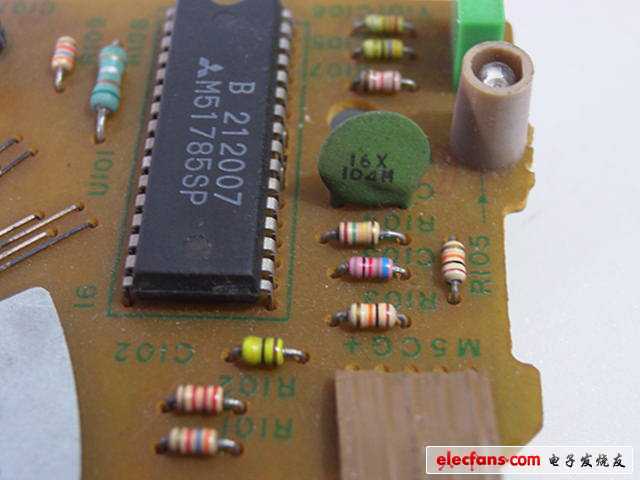
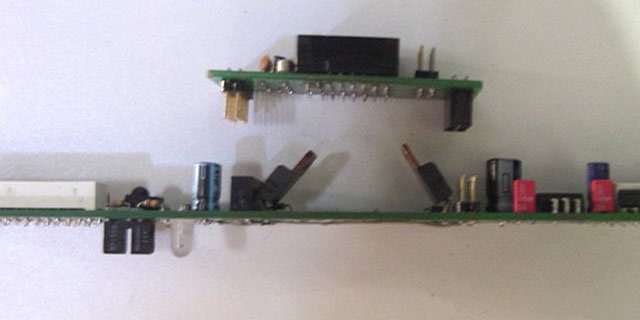
将电路板上较突出的元件改焊在反面,
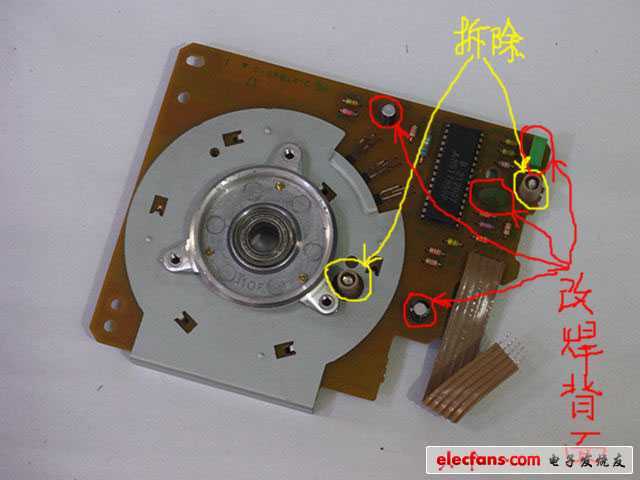
电机的电源接法。
从电路板标注的符号看,“+”为电源正,“G”为电源负,
“C”与“M”端分别与电源正相连匀可使电机运转
将一张旧唱片按电机座的位置开孔,而定位用的挡光板应根据电路板上感光组件的位置确定。

二。电路板的制作
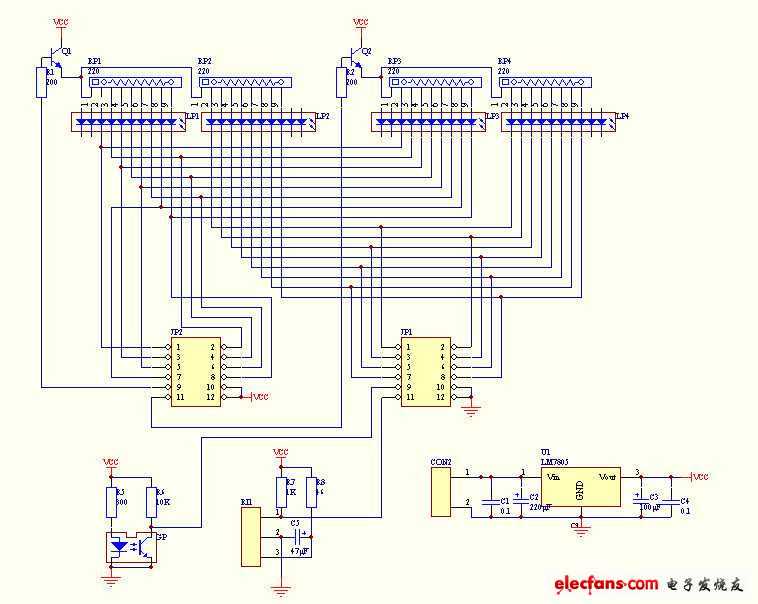
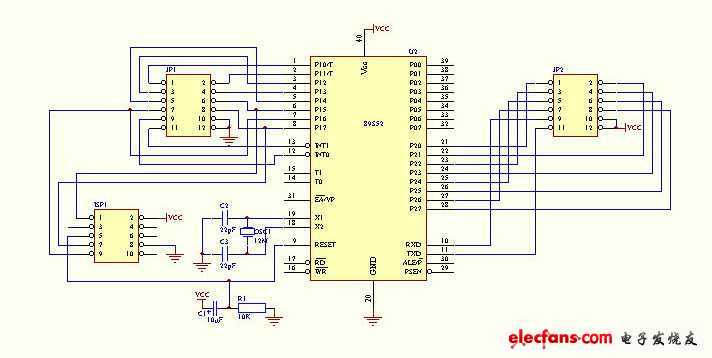
本制作品用51单片机控制,具体电原理图如下:
用Protel 99设计制作了电路板。
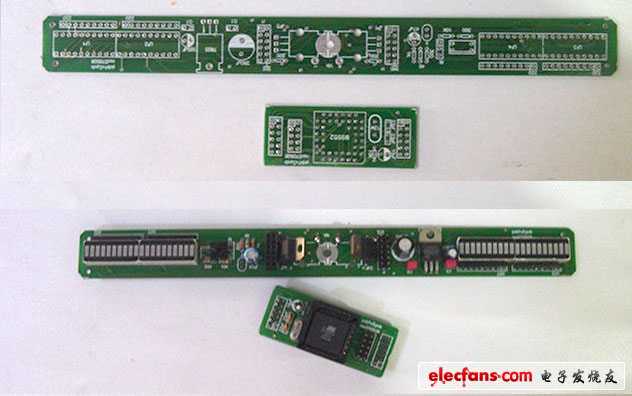

最后得到完成的作品。

遥控器用的是松下车载机的,只用了其中的六个键。

三。软件编程
因学的是C51(不懂汇编)这里只提供C语言源程序,并限制为无遥控功能。也可提供带遥控功能的hex文件。
开机时

调时状态

正常运行状态
由于刚学51单片机,加上制作电路板软件也是从零开始,的确花了我不少的时间和精力。不过也就是在这艰难的独立制作中,真正学到了不少实在的东西。
本项目的关键是如何解决高速旋转的电路板如何供电,如何调时的问题。我采用电机电刷的原理,将旋转轴钻空,通过一只插头将电源的从反面引到前面的电路板上,而这个旋转的插头又与固定在背板上的两个铜片接触的。调时的问题有些困难,一是让电路板在旋转前与PC机相接,由电脑传送调时数据,这虽然可行但不方便。还有就是用遥控方法,但此方案在调试方面有很大的困难。
显示方式上,我采用平衡式的两排LED,这除了在旋转时能较好的保持平衡外,主要能利用两边交替显示方式,比单排要快一倍。
本装置不仅是一个时钟,它还可以动态显示汉字及图案,这就看如何发挥了
其具体制作过程如下:
一。旋转电机的制作
从制作成本与方便考虑,选用旧电脑用的大软驱上的直流无刷电机,只是对局部进行改造。
就是这种古董软驱
软驱上的直流无刷电机
拆开后的电机
仔细拆开直流电机,将带圆盘的铝轴从中开孔,让它刚好能插入一个插头。
将旋转轴加工成这样
装配好以后
按拆开时的顺序,反序将轴安装直流电机上。
电机装配完成后
用两片铜片做的电刷
电刷装好后的侧面图
将电路板上较突出的元件改焊在反面,
电机的电源接法。
从电路板标注的符号看,“+”为电源正,“G”为电源负,
“C”与“M”端分别与电源正相连匀可使电机运转
将一张旧唱片按电机座的位置开孔,而定位用的挡光板应根据电路板上感光组件的位置确定。
二。电路板的制作
本制作品用51单片机控制,具体电原理图如下:
用Protel 99设计制作了电路板。
最后得到完成的作品。
遥控器用的是松下车载机的,只用了其中的六个键。
三。软件编程
因学的是C51(不懂汇编)这里只提供C语言源程序,并限制为无遥控功能。也可提供带遥控功能的hex文件。
- #include
- sbit gate11=P3^0;
- sbit gate12=P3^1;
- #define unit unsigned int
- #define uchar unsigned char
- uchar data BUFFER[]={0,0,0,0,1,1,7};
- uchar data M[]={31,28,31,30,31,30,31,31,30,31,30,31};
- uchar code NUM1[] =
- {
- 0x80,0x7F,0xC0,0xFF,0x40,0x90,0x40,0x8C, // -0-
- 0x40,0x82,0xC0,0xFF,0x80,0x7F,0x00,0x00,
- 0x00,0x00,0x00,0x81,0x80,0x81,0xC0,0xFF, // -1-
- 0xC0,0xFF,0x00,0x80,0x00,0x80,0x00,0x00,
- 0x80,0xE0,0xC0,0xF0,0x40,0x98,0x40,0x8C, // -2-
- 0x40,0x86,0xC0,0xC3,0x80,0xC1,0x00,0x00,
- 0x80,0x40,0xC0,0xC0,0x40,0x84,0x40,0x84, // -3-
- 0x40,0x84,0xC0,0xFF,0x80,0x7B,0x00,0x00,
- 0x00,0x0C,0x00,0x0E,0x00,0x0B,0x80,0x89, // -4-
- 0xC0,0xFF,0xC0,0xFF,0x00,0x88,0x00,0x00,
- 0xC0,0x47,0xC0,0xC7,0x40,0x84,0x40,0x84, // -5-
- 0x40,0x8C,0x40,0xFC,0x40,0x78,0x00,0x00,
- 0x00,0x7F,0x80,0xFF,0xC0,0x84,0x40,0x84, // -6-
- 0x40,0x84,0x00,0xFC,0x00,0x78,0x00,0x00,
- 0xC0,0x00,0xC0,0x00,0x40,0xF0,0x40,0xF8, // -7-
- 0x40,0x0C,0xC0,0x07,0xC0,0x03,0x00,0x00,
- 0x80,0x7B,0xC0,0xFF,0x40,0x84,0x40,0x84, // -8-
- 0x40,0x84,0xC0,0xFF,0x80,0x7B,0x00,0x00,
- 0x80,0x03,0xC0,0x87,0x40,0x84,0x40,0x84, // -9-
- 0x40,0xC4,0xC0,0x7F,0x80,0x3F,0x00,0x00,
- 0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x63, // -:-
- 0x00,0x63,0x00,0x00,0x00,0x00,0x00,0x00,
- };
- uchar code NUM2[]=
- {
- 0x00,0x00,0x7f,0x80,0xff,0xc0,0x82,0x40, // -0-
- 0x8c,0x40,0x90,0x40,0xff,0xc0,0x7f,0x80,
- 0x00,0x00,0x00,0x00,0x20,0x40,0x60,0x40, // -1-
- 0xff,0xc0,0xff,0xc0,0x00,0x40,0x00,0x40,
- 0x00,0x00,0x41,0xc0,0xc3,0xc0,0x86,0x40, // -2-
- 0x8c,0x40,0x98,0x40,0xf0,0xc0,0x60,0xc0,
- 0x00,0x00,0x40,0x80,0xc0,0xc0,0x88,0x40, // -3-
- 0x88,0x40,0x88,0x40,0xff,0xc0,0x77,0x80,
- 0x00,0x00,0x0c,0x00,0x1c,0x00,0x34,0x00, // -4-
- 0x64,0x40,0xff,0xc0,0xff,0xc0,0x04,0x40,
- 0x00,0x00,0xf8,0x80,0xf8,0xc0,0x88,0x40, // -5-
- 0x88,0x40,0x8c,0x40,0x8f,0xc0,0x87,0x80,
- 0x00,0x00,0x3f,0x80,0x7f,0xc0,0xc8,0x40, // -6-
- 0x88,0x40,0x88,0x40,0x0f,0xc0,0x07,0x80,
- 0x00,0x00,0xc0,0x00,0xc0,0x00,0x83,0xc0, // -7-
- 0x87,0xc0,0x8c,0x00,0xf8,0x00,0xf0,0x00,
- 0x00,0x00,0x77,0x80,0xff,0xc0,0x88,0x40, // -8-
- 0x88,0x40,0x88,0x40,0xff,0xc0,0x77,0x80,
- 0x00,0x00,0x70,0x00,0xf8,0x40,0x88,0x40, // -9-
- 0x88,0x40,0x88,0xc0,0xff,0x80,0x7f,0x00,
- 0x00,0x00,0x00,0xc0,0x01,0x80,0x03,0x00, // -/-
- 0x06,0x00,0x0c,0x00,0x18,0x00,0x30,0x00,
- };
- unit disp1,disp2,key1,key2;
- unit ii,jj;
- unit i,sw,xz;
- void Delay(unit ms){
- ms=ms*3;
- while(--ms);
- }
- void num_led(int kk, int tt)
- {
- int jj;
- for(jj=0;jj<8;jj++){
- gate11=key1; gate12=key2;
- P2=~NUM1[kk+jj*2];P1=~NUM1[kk+1+jj*2];
- Delay(20);
- P1=0xff;P2=0xff;
- gate11=key2; gate12=key1;
- P2=~NUM2[tt+15-jj*2];P1=~NUM2[tt+14-jj*2];
- Delay(20);
- P1=0xff;P2=0xff;
- }
- }
- void display_clock(void)
- {
- key1=!key1;key2=!key2;
- disp1=BUFFER[3]/10;disp2=BUFFER[4]-(BUFFER[4]/10)*10;
- ii=disp1*16;jj=disp2*16;
- num_led(ii,jj);
- P2=0xff;P1=0xff;Delay(60);
- disp1=BUFFER[3]-disp1*10;disp2=BUFFER[4]/10;
- ii=disp1*16;jj=disp2*16;
- num_led(ii,jj);
- P2=0xff;P1=0xff;Delay(60);
- ii=160;jj=160;
- num_led(ii,jj);
- P2=0xff;P1=0xff;Delay(60);
- disp1=BUFFER[2]/10;disp2=BUFFER[5]-(BUFFER[5]/10)*10;
- ii=disp1*16;jj=disp2*16;
- num_led(ii,jj);
- P2=0xff;P1=0xff;Delay(60);
- disp1=BUFFER[2]-disp1*10;disp2=BUFFER[5]/10;
- ii=disp1*16;jj=disp2*16;
- num_led(ii,jj);
- P2=0xff;P1=0xff;Delay(60);
- ii=160;jj=160;
- num_led(ii,jj);
- P2=0xff;P1=0xff;Delay(60);
- disp1=BUFFER[1]/10;disp2=BUFFER[6]-(BUFFER[6]/10)*10;
- ii=disp1*16;jj=disp2*16;
- num_led(ii,jj);
- P2=0xff;P1=0xff;Delay(60);
- disp1=BUFFER[1]-disp1*10;disp2=BUFFER[6]/10;
- ii=disp1*16;jj=disp2*16;
- num_led(ii,jj);
- P2=0xff;P1=0xff;Delay(60);
- }
- void timer0(void) interrupt 1 using 1
- {
- TMOD=0x11;
- TH0=-(5000/256);
- TL0=-(5000%256);
- TR0=1;
- BUFFER[0]=BUFFER[0]+1;
- if (BUFFER[6]%4==0) M[1]=M[1]+1;
- if (BUFFER[0]>201+xz){
- BUFFER[0]=0;
- BUFFER[1]=BUFFER[1]+1;
- if (BUFFER[1]==60){
- BUFFER[1]=0;
- BUFFER[2]=BUFFER[2]+1;
- if (BUFFER[2]==60){
- BUFFER[2]=0;
- BUFFER[3]=BUFFER[3]+1;
- if (BUFFER[3]==24){
- BUFFER[3]=0;
- BUFFER[4]=BUFFER[4]+1;
- if (BUFFER[4]>M[BUFFER[5]-1]){
- BUFFER[4]=1;
- BUFFER[5]=BUFFER[5]+1;
- if (BUFFER[5]>12){
- BUFFER[5]=1;
- BUFFER[6]=BUFFER[6]+1;
- if(BUFFER[6]>99) {
- BUFFER[6]=0;
- M[1]=M[1]-1;
- }
- }
- }
- }
- }
- }
- }
- }
- void intersvr0(void) interrupt 0
- {
- sw=1;
- }
- void main(void)
- {
- xz=8;
- key1=1;key2=0;
- EA=1;
- IT0=1;EX0=1;
- IT1=1;ET0=1;
- TMOD=0x11;
- TH0=-5000/256; TL0=-5000%256;
- TR0=1;
- for(;;){
- Delay(10);
- if(sw==1) {display_clock();sw=0;}
- }
- }
四。运行效果
从开机,调整到最后完成。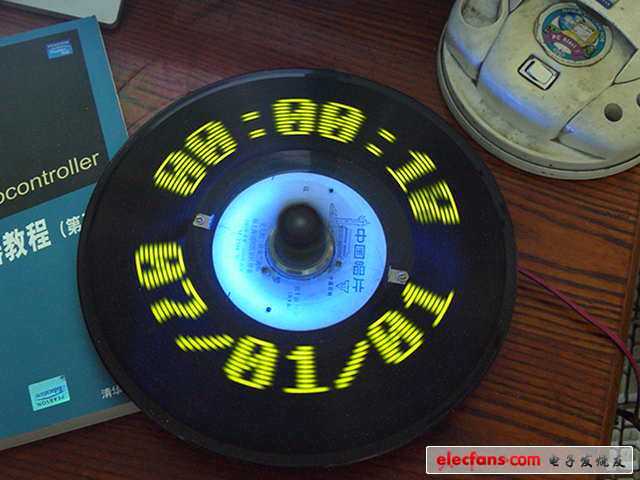
开机时
调时状态
正常运行状态
没有完整的源程序,不好
小编牛人啊!
用了几只LED?
学习
好样的
厉害 学习中
高手啊
不错的
高手啊!
厉害啊
强
厉害!厉害!
小编,能不能具体说说用红外遥控是怎么调时的
NB ~ 还在学习中
学习了
求指导,我也想做