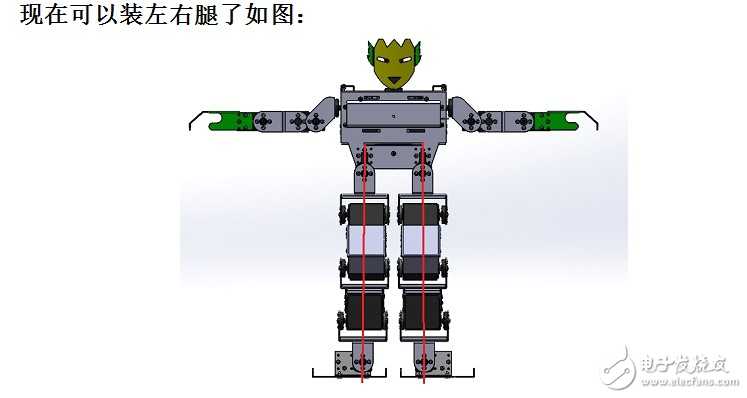
17自由度人形机器人全套资料之安装部分(连载中……)
时间:10-02
整理:3721RD
点击:
【本款机器人正在众筹http://z.elecfans.com/24.html,期待得到大家的支持】
自己用solidworks画了一套机器人结构,加工零件后,就立马安装调试了,下面是我做了一套完整安装教程,大家有什么问题可以和我交流,对人形机器人感兴趣的可以找我的。后面资料会继续更新…… 准备工作:拿出所有机器人支架,参照支架清单清点清楚;准备好螺丝刀和配好的相关螺丝;准备好舵机控制器跟电源及相关配件(用于舵机的调试,可参考舵机调试视频);如有条件自备电烙铁及焊锡。
安装过程:整个机器人安装可以分为四个步骤:支架组合安装、躯干及头部安装、腿部安装、手臂安装。下面我会结合三维装配图一步步来介绍(可以一边看本文档一边看录制的三维装配视频)。
支架组合安装
这里所有组装的支架分三种分别是以下三种:
按图示装好可以依次命名为1号组合、2号组合、3号组合。装好后放在一旁后面会用到这些。自此机器人要用到的相关支架都装好了。
下面我们看下躯干及头部的安装。
躯干及头部安装
1.首先取出一个胸板跟降压模块还有一些电源线及M3x10平头螺丝、M3螺母 如下图所示:
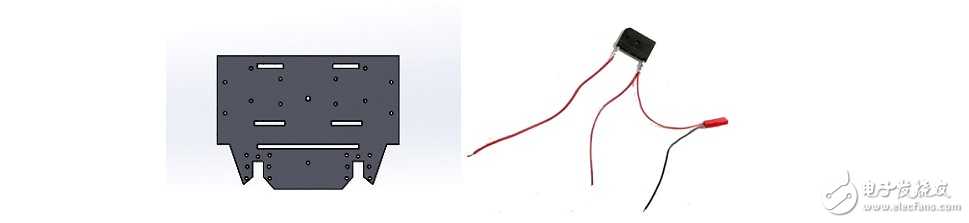
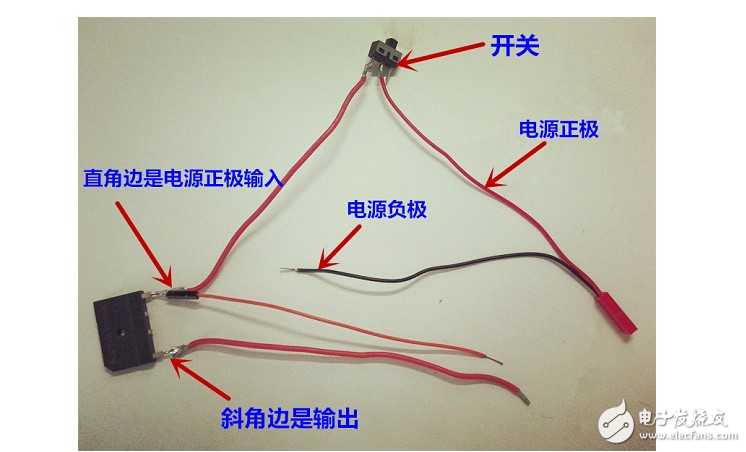
2. 把降压模块中间两个引脚掰掉,然后跟相关电源线按下图用焊锡焊接起来:
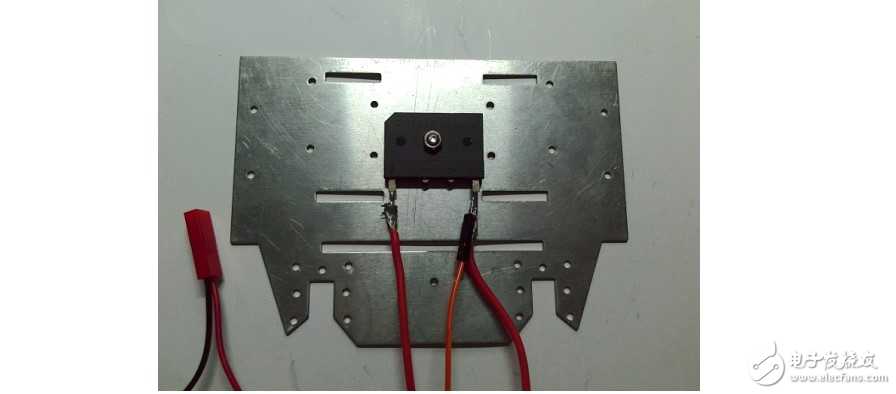
3. 焊接好后把这部分跟胸板用M3x10平头螺丝和M3螺母连接起来如下图:
现在拿出PS2接收器,把其中一面的四个螺丝卸下来,如下图所示:

5. 找到配件包,在里面拿出4个M2x10自攻螺丝,如下图:

6. 把PS2接收器跟上面那块胸板用M2x10自攻螺丝连接起来。
具体可参考《三维组装讲解视频》。
7. 准备4个M2x40的组合铜柱和4个M3x16铜柱及配套的M2x6螺丝 M3x6螺丝。如下图:

把这些螺柱安装到前面装好的胸板上,具体可以参照《三维组装讲解视频》。
8. 取出另一块胸板、锂电池、捆扎带、3个M2x20铜柱及3个M2x6螺丝。具体安装方法参照《三维组装讲解视频》。
9. 下面看看头部及肩部的安装过程。
这部分具体参看《三维组装讲解视频》,比较直接清楚。这部分装好之后如下图所示:
注意:这里的舵机要先通过上位机软件调到P1500位置。
10. 头部肩部装好后,与两个胸板套件用螺丝连接起来,装好后如下图所示:
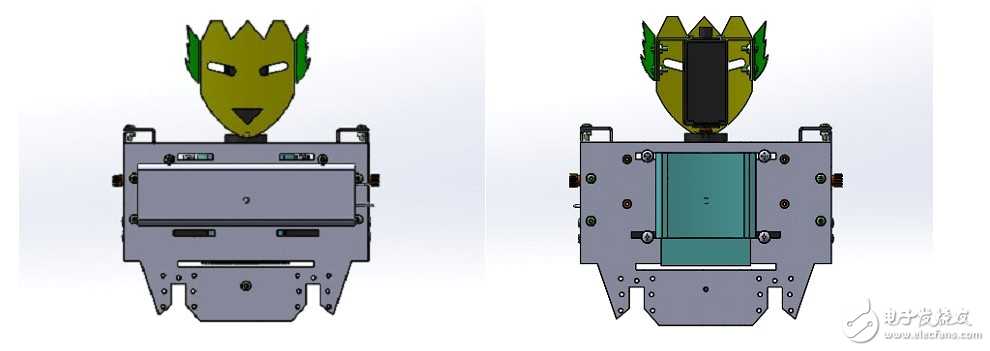
具体装配过程参照《三维组装讲解视频》。
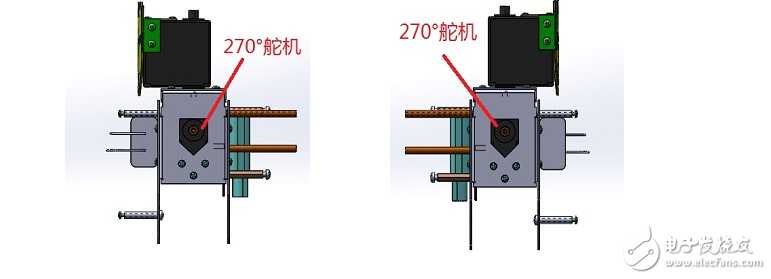
11. 取出两个270度舵机分别装在左右肩部,如下图:
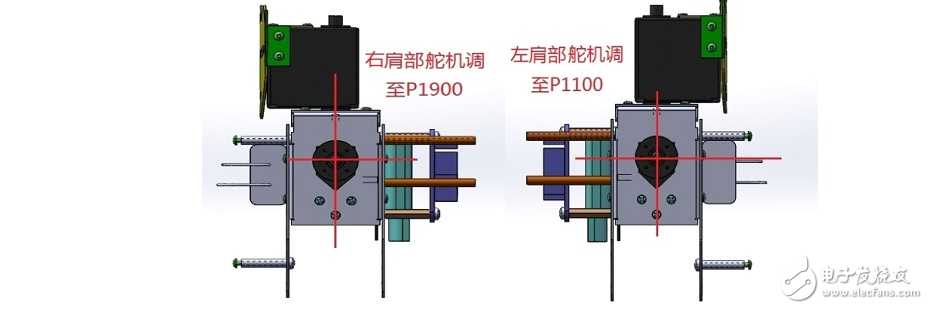
分别通过上位机调整这两个舵机的位置,左肩舵机调至P1100,右肩调至P1900(这里的左肩右肩是我们自己看过去的左右不是机器人自身的左右肩,下面左右腿亦如此)。然后取两个主舵盘分别装在舵机上,同时用M3x6螺丝固定。
注意保持两条线的垂直关系,如下图:
舵盘装好了拿出两个斜U(JQR008),分别用M2x6自攻螺丝固定在左右肩上。如下图:
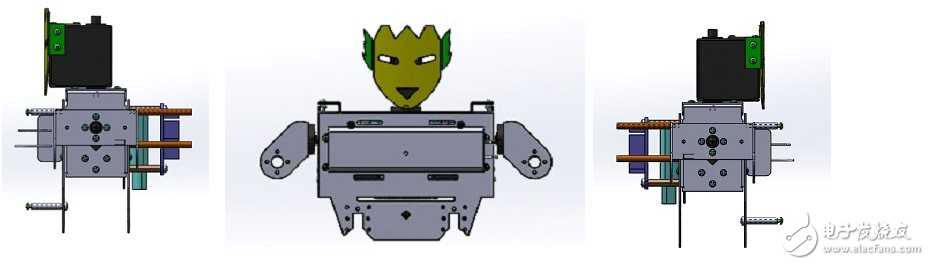
上面几步装好之后再拿出两个普通的180度舵机安装在如下位置:
自此躯干及头部已经组装好了,这部分先放在一旁。下面我们来看看左右两条腿的安装过程。
腿部安装(很关键)
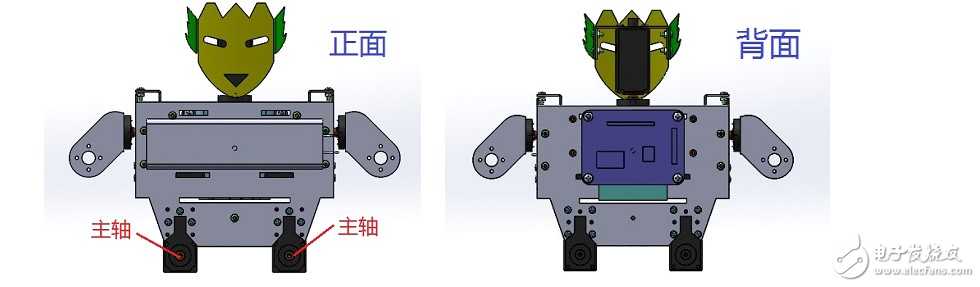
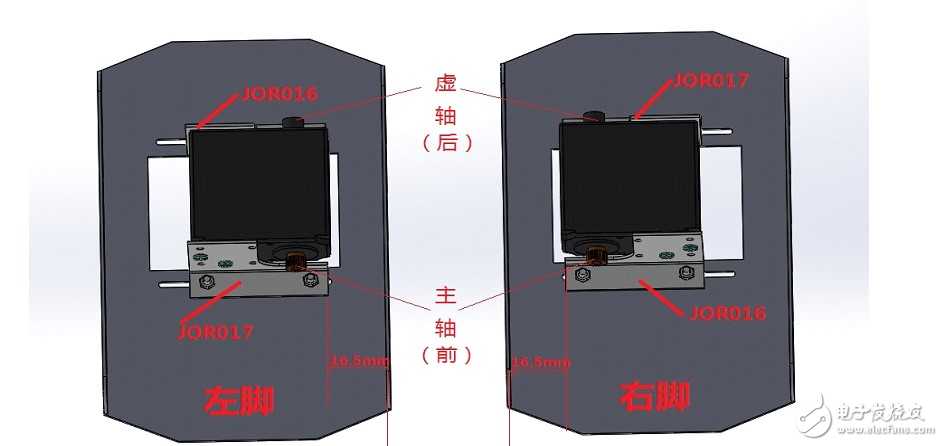
? 取出两块脚板(不分左右脚)、图号为JQR016和JQR017两种连接板、两个舵机以及若干M2x6平头螺丝 M2螺母 M2x6自攻螺丝 。具体组装过程可参照《三维组装讲解视频》。装好如下图:
? 按照上图装好之后 拿出主副舵盘和前面装好的1号组合。

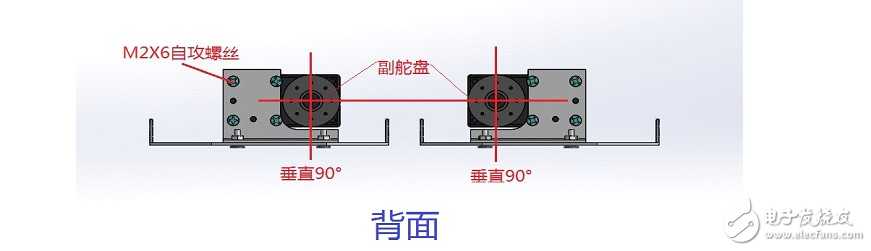
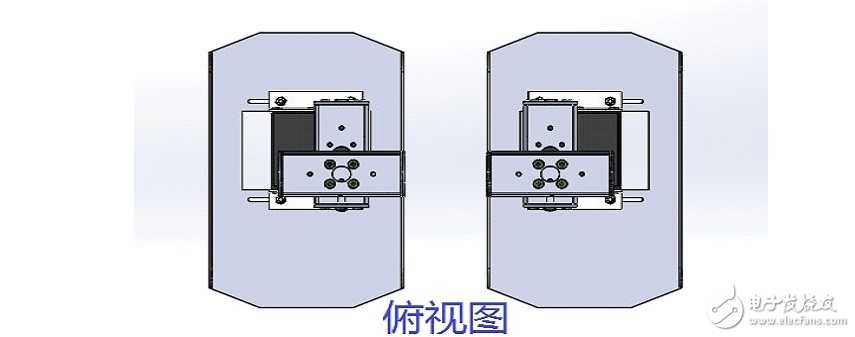
将左右脚上的舵机通过上位机分别调到P1500位置,再将主副舵盘按下图位置分别装在舵机的主轴跟虚轴上。
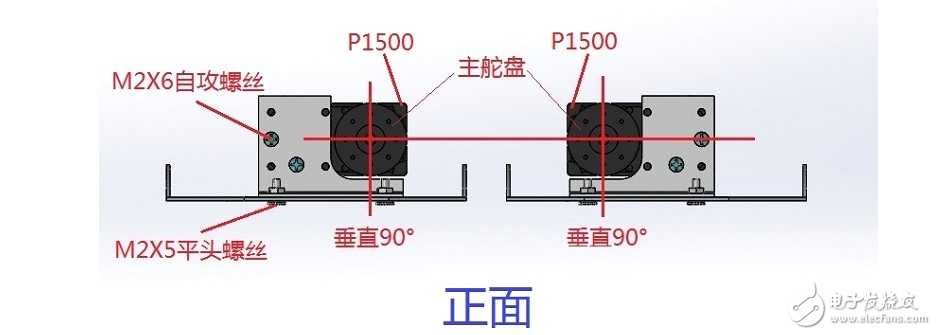
注意看上面两条垂直线 是在舵机已经调到P1500位置时,使舵盘的其中两个孔连线保持水平位置,另两个孔连线保持在垂直位置,这里需要慢慢8个孔位慢慢试尽量保证如上所示。安装时有一点偏差也没关系,后面再通过上位机调偏差。背面也尽量如此
? 再将1号组合装到左右脚上。如下图:

注意先固定虚轴那边,再锁主轴这边,都是用M2X6自攻螺丝固定。
? 取出两个3号组合跟两个舵机如下图所示组装在一起。
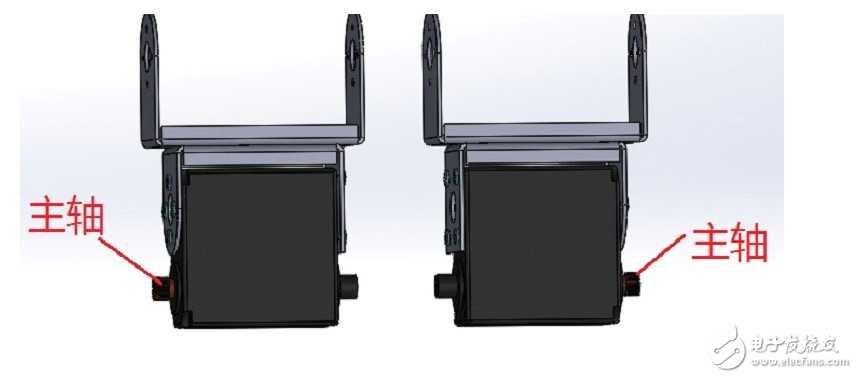
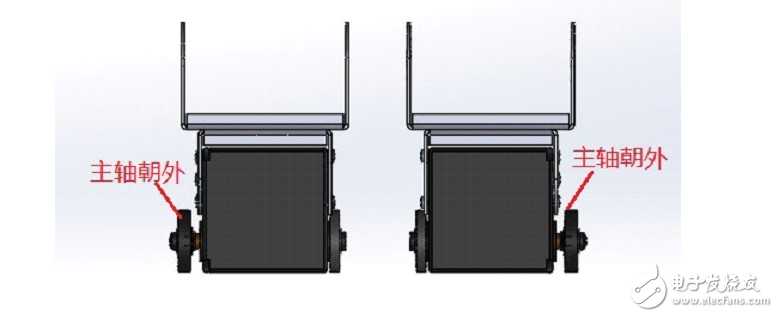
注意主轴应朝外,两边分别锁上M2x6自攻螺丝。
通过上位机软件分别把两个舵机调到P1500位置,再安装主副舵盘。从侧面看尽量保持舵盘上的有两个孔的连线处于水平位置,有两个孔的连线处于垂直位置。安装时有一点偏差也没关系,后面再通过上位机调偏差。如下图:
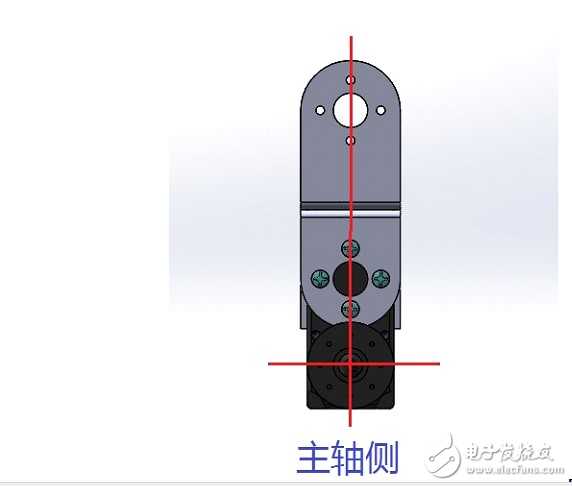
虚轴那一侧也同样如此。
左右两小腿装好舵盘后如下图:
? 上面我们已经装好了小腿部分,现在我们把这部分跟脚步连接起来。
注意安装的时候先装虚轴的那一侧,再装主轴这侧,如图保持垂直的位置。两边都是用M2x6自攻螺丝固定。
? 以上部分装好后我们来看下大腿部分的安装。取出图号为JQR009的支架、两个180度舵机,两个270度舵机。

? 下面依次看一下大腿部分如何与其他部分连接。
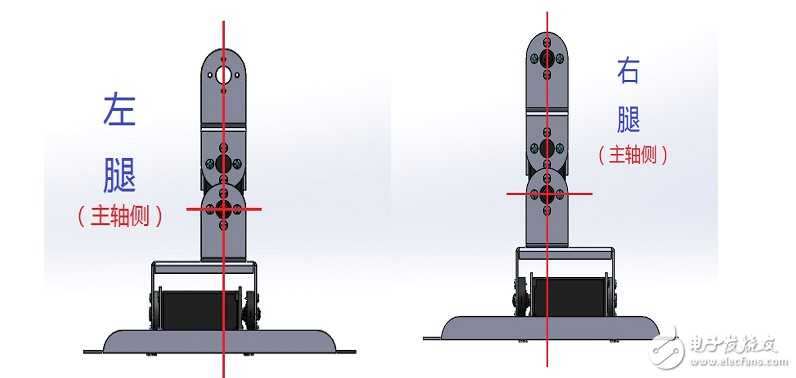
先以左腿为例:
通过上位机将左大腿的两个舵机分别调到各自位置,并装上主副舵盘(先装副舵盘再装主舵盘)。如下图:
如图所示尽量保证图中两条红线的水平跟垂直位置,稍有点偏差也没关系后面再通过上位机调偏差。
再看下右腿:
通过上位机将右大腿的两个舵机分别调到各自位置,并装上主副舵盘(先装副舵盘再装主舵盘)。如下图:
如图所示尽量保证图中两条红线的水平跟垂直位置,稍有点偏差也没关系后面再通过上位机调偏差。
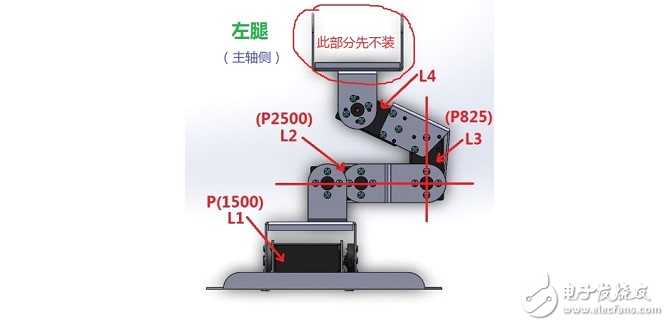
? 装2号组合。同样我们先以左腿为例,将L1舵机调至P1500位置,L2舵机调至P1500位置,L3舵机(270舵机)调至P1850位置,L4调至P1500位置。再将主副舵盘装到L4舵机上,注意主舵盘的位置,跟前面讲的一样尽量保证有两个孔是水平位置,另两个孔是垂直位置并且跟底下几个孔位在一条垂直线上。装好舵盘后再拿出2号组合按图示位置装好(先固定副舵盘,再固定主舵盘)。整体如下图:

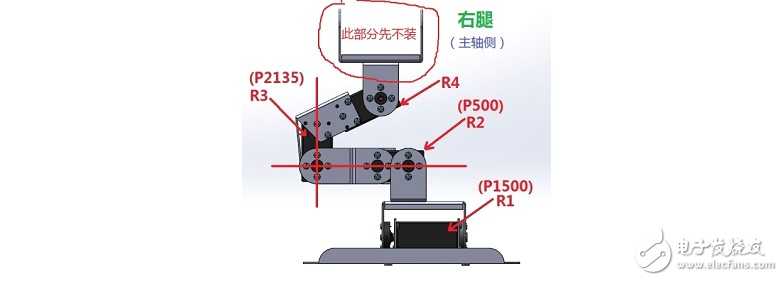
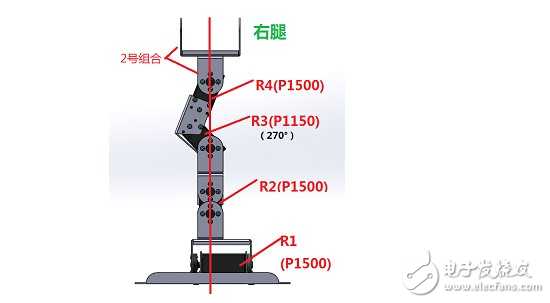
同理我们看下右腿: 将R1舵机调至P1500位置,R2舵机调至P1500位置,R3舵机(270舵机)调至P1150位置,R4调至P1500位置。再将主副舵盘装到R4舵机上,注意主舵盘的位置,跟前面讲的一样尽量保证有两个孔是水平位置,另两个孔是垂直位置并且跟底下几个孔位在一条垂直线上。装好舵盘后再拿出2号组合按图示位置装好(先固定副舵盘,再固定主舵盘)。整体如下图:
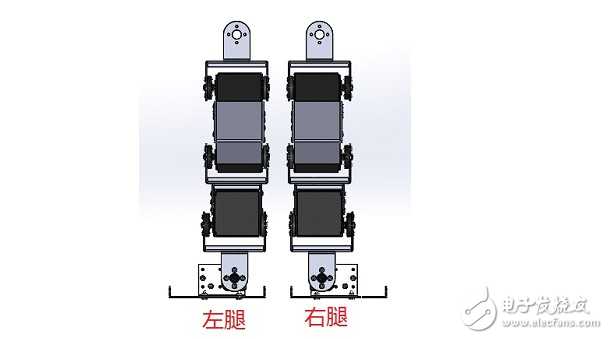
自此左右两条腿就装好了,看下整体效果图
自此机器人的腿部就安装完成了,下面我们来看下两个手臂的安装。
手臂安装
? 取出2个3号组合支架、2个手掌(图号JQR010)、4个180度舵机及若干M2x6自攻螺丝。如下图:
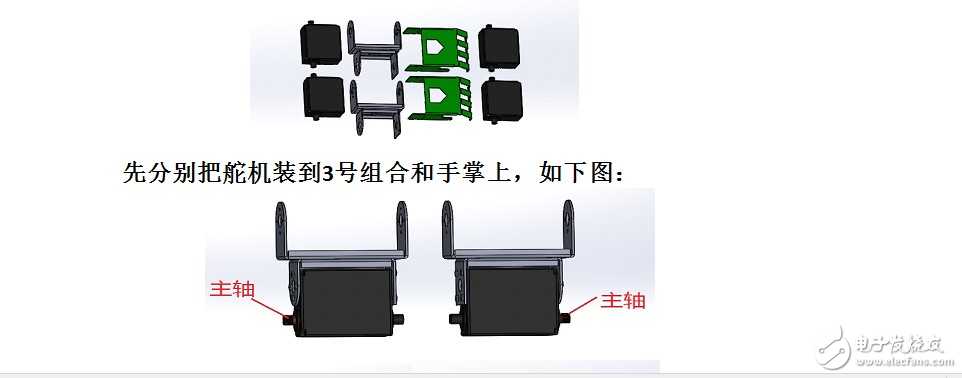
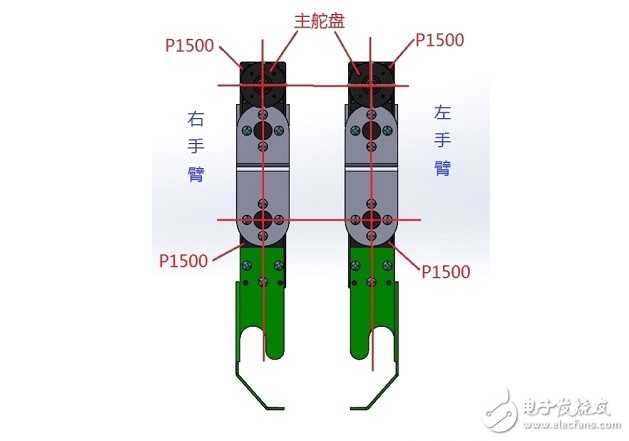
? 如图装好之后拿出主副舵盘分别装在主轴跟虚轴上,注意在这之前通过上位机必须把舵机调到P1500位置,调整舵盘使上面的两个孔在水平位置上再用M2X6自攻螺丝与支架固定,注意先锁副舵盘再锁主舵盘。如下图:
自此手臂部分已经安装完毕。下面我们把每个部分组装到一起。
整体组合安装
? 先看左右手臂的安装,如下图:
如图所示因为前面手臂上的舵机位置已经调好了,这里安装的时候需水平安装尽量保证图示红线在水平处于水平位置,这样做的目的是使手臂可以往上、往下都可以摆动。注意先锁副舵盘再锁主舵盘。下面看下左右腿的安装。
? 拿出前面装好的左右腿和两个主副舵盘。先把左右两个舵机通过上位机调到P1500位置。再分别装上主副舵盘,注意保证舵盘上有两个孔连线在水平线上。舵盘装好后拿出M3x6螺丝固定。如下图
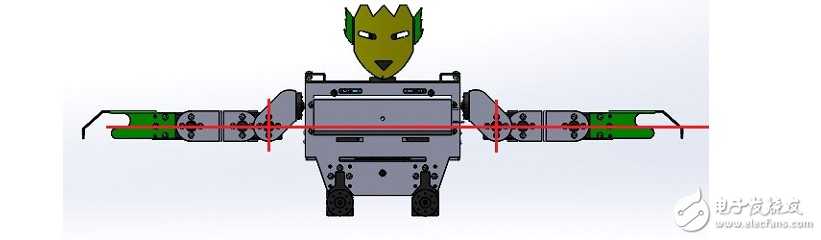
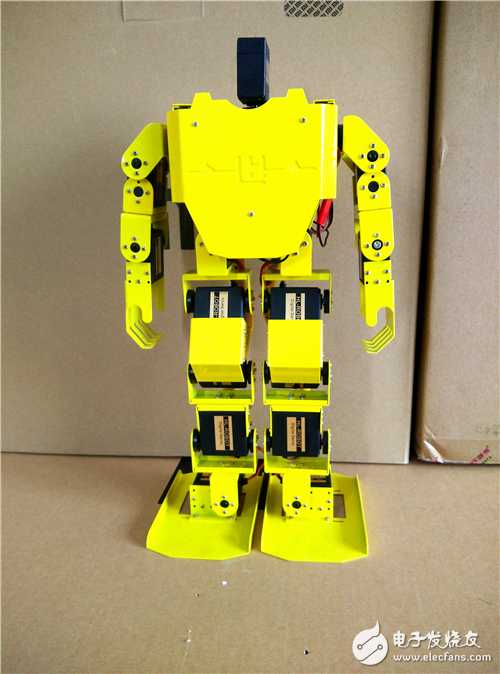
来张实际效果图吧


机器人有关问题可以加我QQ:670043838 讨论
1 计划邀请一批机器人爱好者,一同调试机器人动作,扩展机器人功能,比如目前这套机器人是用舵机控制器实现了大概十几套动作,基本走路,跳舞等相关动作。视频连接:优酷链接:http://v.youku.com/v_show/id_XMTMwMjAzNDUyNA==.html?from=y1.7-1.22. 我们自己STM32编程去实现这些动作,脱离控制器,这样更能学到知识,我后面会写相关的demo程序。当然更复杂动作大家可以一起开发,或者编写上位机控制,传感器控制等更多功能
3.有兴趣的可以加我QQ 670043838,或者你有更多更好的想法可以一起去实现,我有足够多的机器人支架提供给大家。淘宝上那些卖家卖的都太贵,如果愿意一起去完善功能,我可以免费或者按支架成本价提供给喜欢机器人朋友。
自己用solidworks画了一套机器人结构,加工零件后,就立马安装调试了,下面是我做了一套完整安装教程,大家有什么问题可以和我交流,对人形机器人感兴趣的可以找我的。后面资料会继续更新…… 准备工作:拿出所有机器人支架,参照支架清单清点清楚;准备好螺丝刀和配好的相关螺丝;准备好舵机控制器跟电源及相关配件(用于舵机的调试,可参考舵机调试视频);如有条件自备电烙铁及焊锡。
安装过程:整个机器人安装可以分为四个步骤:支架组合安装、躯干及头部安装、腿部安装、手臂安装。下面我会结合三维装配图一步步来介绍(可以一边看本文档一边看录制的三维装配视频)。
支架组合安装
这里所有组装的支架分三种分别是以下三种:

以上三种对应的图号分别是JQR011、JQR012、JQR014。准备好M2x6螺丝跟M2的螺母按照下面的方式进行组装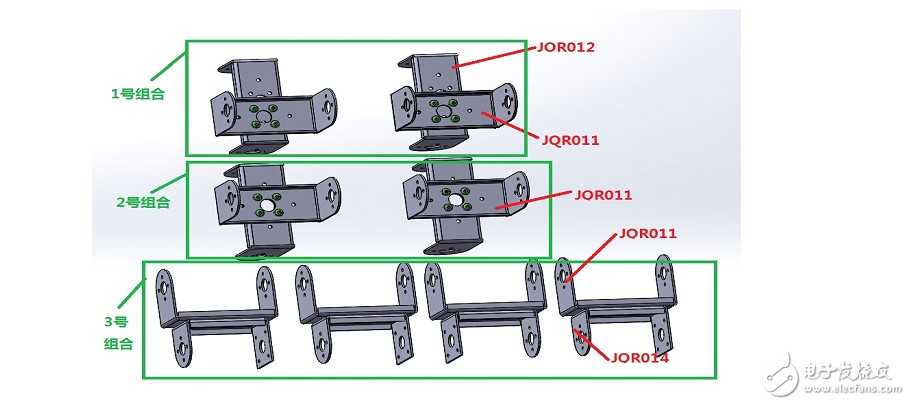
按图示装好可以依次命名为1号组合、2号组合、3号组合。装好后放在一旁后面会用到这些。自此机器人要用到的相关支架都装好了。
下面我们看下躯干及头部的安装。
躯干及头部安装
1.首先取出一个胸板跟降压模块还有一些电源线及M3x10平头螺丝、M3螺母 如下图所示:
2. 把降压模块中间两个引脚掰掉,然后跟相关电源线按下图用焊锡焊接起来:
3. 焊接好后把这部分跟胸板用M3x10平头螺丝和M3螺母连接起来如下图:
现在拿出PS2接收器,把其中一面的四个螺丝卸下来,如下图所示:
5. 找到配件包,在里面拿出4个M2x10自攻螺丝,如下图:
6. 把PS2接收器跟上面那块胸板用M2x10自攻螺丝连接起来。
具体可参考《三维组装讲解视频》。
7. 准备4个M2x40的组合铜柱和4个M3x16铜柱及配套的M2x6螺丝 M3x6螺丝。如下图:
把这些螺柱安装到前面装好的胸板上,具体可以参照《三维组装讲解视频》。
8. 取出另一块胸板、锂电池、捆扎带、3个M2x20铜柱及3个M2x6螺丝。具体安装方法参照《三维组装讲解视频》。
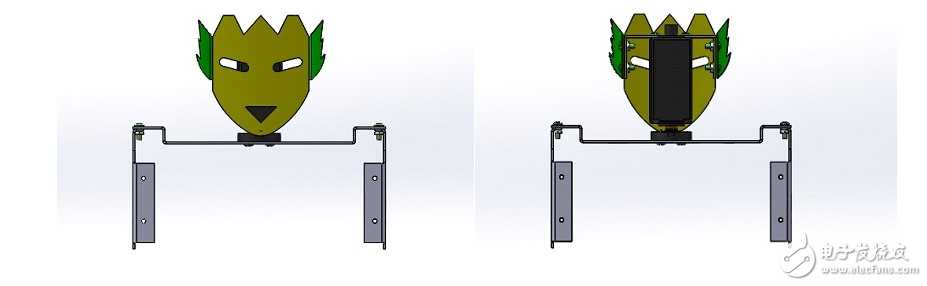
9. 下面看看头部及肩部的安装过程。
这部分具体参看《三维组装讲解视频》,比较直接清楚。这部分装好之后如下图所示:
注意:这里的舵机要先通过上位机软件调到P1500位置。
10. 头部肩部装好后,与两个胸板套件用螺丝连接起来,装好后如下图所示:
具体装配过程参照《三维组装讲解视频》。
11. 取出两个270度舵机分别装在左右肩部,如下图:
分别通过上位机调整这两个舵机的位置,左肩舵机调至P1100,右肩调至P1900(这里的左肩右肩是我们自己看过去的左右不是机器人自身的左右肩,下面左右腿亦如此)。然后取两个主舵盘分别装在舵机上,同时用M3x6螺丝固定。
注意保持两条线的垂直关系,如下图:
舵盘装好了拿出两个斜U(JQR008),分别用M2x6自攻螺丝固定在左右肩上。如下图:
上面几步装好之后再拿出两个普通的180度舵机安装在如下位置:
自此躯干及头部已经组装好了,这部分先放在一旁。下面我们来看看左右两条腿的安装过程。
腿部安装(很关键)
? 取出两块脚板(不分左右脚)、图号为JQR016和JQR017两种连接板、两个舵机以及若干M2x6平头螺丝 M2螺母 M2x6自攻螺丝 。具体组装过程可参照《三维组装讲解视频》。装好如下图:
? 按照上图装好之后 拿出主副舵盘和前面装好的1号组合。
将左右脚上的舵机通过上位机分别调到P1500位置,再将主副舵盘按下图位置分别装在舵机的主轴跟虚轴上。
注意看上面两条垂直线 是在舵机已经调到P1500位置时,使舵盘的其中两个孔连线保持水平位置,另两个孔连线保持在垂直位置,这里需要慢慢8个孔位慢慢试尽量保证如上所示。安装时有一点偏差也没关系,后面再通过上位机调偏差。背面也尽量如此
? 再将1号组合装到左右脚上。如下图:
注意先固定虚轴那边,再锁主轴这边,都是用M2X6自攻螺丝固定。
? 取出两个3号组合跟两个舵机如下图所示组装在一起。
注意主轴应朝外,两边分别锁上M2x6自攻螺丝。
通过上位机软件分别把两个舵机调到P1500位置,再安装主副舵盘。从侧面看尽量保持舵盘上的有两个孔的连线处于水平位置,有两个孔的连线处于垂直位置。安装时有一点偏差也没关系,后面再通过上位机调偏差。如下图:
虚轴那一侧也同样如此。
左右两小腿装好舵盘后如下图:
? 上面我们已经装好了小腿部分,现在我们把这部分跟脚步连接起来。
注意安装的时候先装虚轴的那一侧,再装主轴这侧,如图保持垂直的位置。两边都是用M2x6自攻螺丝固定。
? 以上部分装好后我们来看下大腿部分的安装。取出图号为JQR009的支架、两个180度舵机,两个270度舵机。
? 下面依次看一下大腿部分如何与其他部分连接。
先以左腿为例:
通过上位机将左大腿的两个舵机分别调到各自位置,并装上主副舵盘(先装副舵盘再装主舵盘)。如下图:
如图所示尽量保证图中两条红线的水平跟垂直位置,稍有点偏差也没关系后面再通过上位机调偏差。
再看下右腿:
通过上位机将右大腿的两个舵机分别调到各自位置,并装上主副舵盘(先装副舵盘再装主舵盘)。如下图:
如图所示尽量保证图中两条红线的水平跟垂直位置,稍有点偏差也没关系后面再通过上位机调偏差。
? 装2号组合。同样我们先以左腿为例,将L1舵机调至P1500位置,L2舵机调至P1500位置,L3舵机(270舵机)调至P1850位置,L4调至P1500位置。再将主副舵盘装到L4舵机上,注意主舵盘的位置,跟前面讲的一样尽量保证有两个孔是水平位置,另两个孔是垂直位置并且跟底下几个孔位在一条垂直线上。装好舵盘后再拿出2号组合按图示位置装好(先固定副舵盘,再固定主舵盘)。整体如下图:
同理我们看下右腿: 将R1舵机调至P1500位置,R2舵机调至P1500位置,R3舵机(270舵机)调至P1150位置,R4调至P1500位置。再将主副舵盘装到R4舵机上,注意主舵盘的位置,跟前面讲的一样尽量保证有两个孔是水平位置,另两个孔是垂直位置并且跟底下几个孔位在一条垂直线上。装好舵盘后再拿出2号组合按图示位置装好(先固定副舵盘,再固定主舵盘)。整体如下图:
自此左右两条腿就装好了,看下整体效果图
自此机器人的腿部就安装完成了,下面我们来看下两个手臂的安装。
手臂安装
? 取出2个3号组合支架、2个手掌(图号JQR010)、4个180度舵机及若干M2x6自攻螺丝。如下图:
? 如图装好之后拿出主副舵盘分别装在主轴跟虚轴上,注意在这之前通过上位机必须把舵机调到P1500位置,调整舵盘使上面的两个孔在水平位置上再用M2X6自攻螺丝与支架固定,注意先锁副舵盘再锁主舵盘。如下图:
自此手臂部分已经安装完毕。下面我们把每个部分组装到一起。
整体组合安装
? 先看左右手臂的安装,如下图:
如图所示因为前面手臂上的舵机位置已经调好了,这里安装的时候需水平安装尽量保证图示红线在水平处于水平位置,这样做的目的是使手臂可以往上、往下都可以摆动。注意先锁副舵盘再锁主舵盘。下面看下左右腿的安装。
? 拿出前面装好的左右腿和两个主副舵盘。先把左右两个舵机通过上位机调到P1500位置。再分别装上主副舵盘,注意保证舵盘上有两个孔连线在水平线上。舵盘装好后拿出M3x6螺丝固定。如下图
来张实际效果图吧
机器人有关问题可以加我QQ:670043838 讨论
1 计划邀请一批机器人爱好者,一同调试机器人动作,扩展机器人功能,比如目前这套机器人是用舵机控制器实现了大概十几套动作,基本走路,跳舞等相关动作。视频连接:优酷链接:http://v.youku.com/v_show/id_XMTMwMjAzNDUyNA==.html?from=y1.7-1.22. 我们自己STM32编程去实现这些动作,脱离控制器,这样更能学到知识,我后面会写相关的demo程序。当然更复杂动作大家可以一起开发,或者编写上位机控制,传感器控制等更多功能
3.有兴趣的可以加我QQ 670043838,或者你有更多更好的想法可以一起去实现,我有足够多的机器人支架提供给大家。淘宝上那些卖家卖的都太贵,如果愿意一起去完善功能,我可以免费或者按支架成本价提供给喜欢机器人朋友。
小编好牛气。。
高手,必须要顶一个。
。大神啊
!高手!
高手,必须要顶一个。
这机器人是买的么?
我开模做的,还有好多支架呢
好玩具,支持,,,,,,,,
666666666666666666666666666666666666666666
小编,我也正打算整一个玩玩呢,你买的啥牌子舵机,多少钱一个?还有最最重要的,你的支架卖不,价格合适的话匀我几个呗?
控制好说,主要是手头现在没支架
可以啊,我有好多架子呢。可以成本价给你,我留着也没啥用。舵机我有厂家,价格也很便宜 数字舵机60多一个。有兴趣可以加我QQ 670043838
17自由度机器人功能演示
很不错啊,平衡看上去不太好掌握。
谢谢小编的分享!
能不能看看 电控部分?非常有兴趣
赞 赞 赞
做的太好了,期待小编的电路和程序部分的更新
期待小编的电路和控制部分