增量式和位置式PID
比例带是一个无量纲的纯数值,其物理意义为:调节阀从全开到全关(输出做全量程范围变化时),输入(被控量)的变化占其全量程变化范围的百分数。如输入为温度,输出为阀门开度,1-100摄氏度量程,如希望温度从15——20度变化时,阀门从全开到全关,比例带为5%。
以智能车速度控制为例,控制量占空比从0-100%变化,如设定速度值为60,测量值为40则100%占空比加速,测量值为80则0占空比。即速度从80变化到40,占空比从0变化到100%,则比例带为40%。
比例带反映的是对误差的敏感程度,比例带越小,对误差越敏感。对误差越敏感,越容易引起震荡。
以下是PID的公式
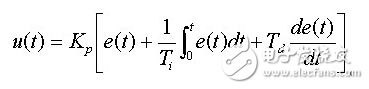
当然在单片机中,积分用求和来完成,微分用做差来完成。

其中:
Kp为比例带的倒数,比例带越小,KP越大,对误差越敏感。
其中T为采样时间,若10ms测速一次,则T=10ms,Ti为积分时间,积分时间约大,积分作用越弱。Ti积分时间的物理意义为,当误差不变的情况下,积分作用达到和比例控制相同的效果所需的时间。例如,当误差为5%时,比例控制给出100%的控制量,若不考虑比例控制,只用积分,同样是5%的误差且不变,当积分时间为5s时,也能达到100%,不过需要5s的时间。也就是说,当误差一定时,比例控制会立刻起作用,而积分控制也能达到和比例相同的效果,但是需要经过一定时间,这个时间就是积分时间。这一点从公式中推导一样可以得到这个结论。引入的积分的目的是消除稳态误差。一般的空调控制,只用PI即可,智能车控制则方向一般用PD,速度可用PI,也可用PID。若使用PI控制,位置式的缺点就是积分饱和,也就是当控制量已经达到最大时,误差仍然在积分作用下继续累积,一旦误差开始反向变化,则系统需要较长时间从饱和区退出。当u(k)达到最大和最小时,需要停止积分作用,否则进入饱和时,则难以对误差的变化有快速的反应。如采用增量式则可以消除这个问题。
理论真难懂
代码呢?