坦克打靶设计方案及实现
时间:10-02
整理:3721RD
点击:
寻迹模块的设计
寻迹电路采用的是6个ST188光电传感器作为检测器件,电路中所接的红外发射管不断向外发射红外光 ,当检测到黑线时,红外线被吸收,LM339同相端输入高电平,反相端通过调节电位器输入定值电压,此时电压比较器输出高电平,发光二极管处于截止状态,相反检测到白色底板,通过比较器输出低电平,发光二极管暗。具体电路图如图3所示。图2为六个传感器安装图。

图2

图3
直流电机驱动模块
L298N为主控制芯片,辅以外围简单电路,可以实现驱动直流电机或步进电机的功能。L298N内部包含4通道逻辑驱动电路,IN1,IN2,IN3,IN4(5,7,10,12脚)接输入控制电平,OUT1,OUT2,OUT3,OUT4(2,3,13,14脚)接电机。可通过PWM控制电机的转向、启动与停止。如图4所示。
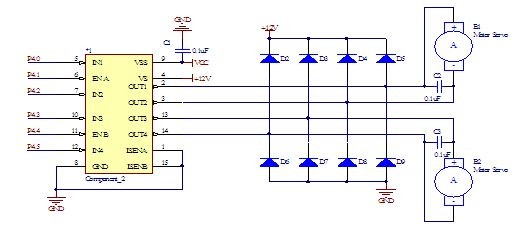
图4
炮台点击驱动模块
本帖隐藏的内容THB7128内部集成了细分、电流调节、CMOS功率放大等电路,配合简单的外围电路即可实现高性能、多细分、大电流的驱动电路。适合驱动42、57型两相、四相混合式步进电机。在低成本、低振动、小噪声、高速度的设计中应用效果较佳。 THB7128外围电路简单,通过CLK直接采用单脉冲和方向信号译码控制模式控制,可实现正反转,通过M1,M2,M3,3位选择设置8档细分控制(1,1/2,1/4,1 /8, 1/16, 1/32, 1/64, 1/128)
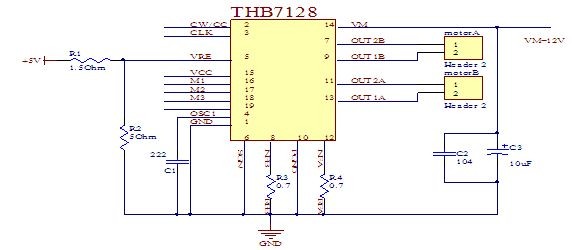
图5
光源检测模块
用光敏电阻作为光源定位传感器,可以把光信号转换成电信号,光源定位模块电路如图所示。将光敏电阻与光源灯泡安装在同一个水平高度上,当小车到达射击点后,炮塔360度转动寻找光源,当其中的某一个时刻,光源的灯光通过黑色圆筒照射到光敏电阻R1上,此时R1呈现亮电阻性,由R1和R2构成的分压电路可以输出一个突然增大的电压,此时对单片机而言,就已确定了光靶中心线的位置。然后单片机发出指令,让激光二极管发射激光,从而实现激光打靶。
声光报警模块
题目要求坦克在行进的过程中当偏离原轨道时自动发出声光报警且在射击时也要自动给出光电信号。我们采用蜂鸣器代替普通的扬声器,用一个9013三极管驱动此蜂鸣器,在放光方面,考虑到电路的简易程度,功耗和电源的因素,系统采用发光二极管显示。电路如图所示
且由1138的PG4引脚控制此模块,当出现故障时,PG4输出高电平时通过三极管的放大作用,使得蜂鸣器工作,发出声音,发光二极管也导通,发出光线。
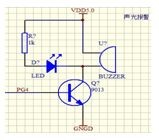
图6
电源模块
小车采用12V电池供电,由于传感器需采用5V 供电,主控制芯片采用3.3V供电,故3.3V电源模块的电路如下图所示:
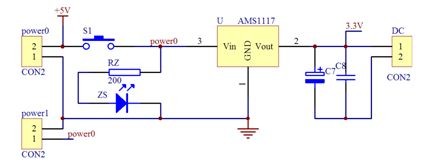
图7
系统软件设计
系统软件设计采用C语言,对MSP430单片机进行变成实现各项功能。程序是在Windows环境下采用IAR Embedded Workbench软件编写的,可以实现小车对光电传感器的查询、输出脉冲占空比的设定、电机方向的确定等功能。主程序主要起到一个导向和决策功能,决定什么时候小车该做什么。小车各种功能的实现主要通过调用小车寻迹、光源探测,炮塔驱动、火炮控制等多个功能子程序完成。
系统流程图

图8
系统测试
将小车放于起跑线,开启电源开关,开始前行,观察遇到炮击点时发光二极管的变化,以及蜂鸣器是否发出声音。按照题目给定的尺寸,在实验室自做场地,测试。经过实际的测试,小车能够可靠实现循迹和激光打靶的功能,各个功能模块运转正常,小车运行平稳,基本符合要求,但由于没有使用算法,造成小车在运动打靶效果不理想,我们会进一步修改程序,加入高级的算法,使小车的运行更加稳定。
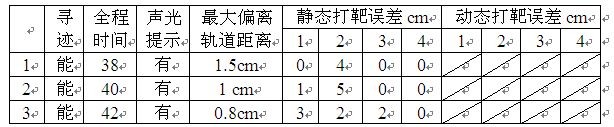
表1
实验小结
我们在车底部安了4个st188来检测路面黑线,防止小车跑出跑道,再安了一个距离黑线轨道比较远的st188来检测黑短线。车子使用直流电机驱动,我们用MSPG2553产生PWM波来控制电机的速度。由于坦克是用履带驱动前后轮的,转弯不是很灵活,我们采用一个电机正转,一个电机反转的方式实现转弯。
刚开始我们打算采用舵机控制炮台,但是舵机只能转180度,存在些盲区,有些地方打不到。我们就改用步进电机控制。寻光我们在炮台上安装了8个光敏三极管,用来靶子方向并寻光,但由于灯泡功率比较小,亮度不是很亮,光敏三极管偏离靶心一定接收到的光就很弱,不好进行比较判断方向。后来,我们只用一个光敏三极管,让电机转一圈,寻找采用最大点,在转到最大点处去,打靶误差在5cm以内。由于硬件问题,动态打靶效果不理想。
谢谢分享!
学习学习!

不错,我应该向你学习。
请教下,那个光源检查模块那不懂,当光敏电阻斜对光源时也有电压差,怎么确定光源具体位置。
感谢分享!正想做这个呢。