nrf24l01调试求助……
我现在连发送都发不了……看着网上好多高人问接收不到,我这发送都发送不了……这块的程序和资料看了好几个周了, 依然没有进展,特来求助
驱动程序给你看一下
/**************************************************/
/* 函数: init_io() */
/* 描述:初始化IO */
/**************************************************/
void init_io(void)
{
CE = 0; // 待机
CSN = 1; // SPI禁止
SCK = 0; // SPI时钟置低
IRQ = 1; // 中断复位
}
/**************************************************/
/*函数: init_ser() */
/*描述:初始化串口 */
/**************************************************/
void init_ser()
{
TMOD = 0x20; //定时器T1使用工作方式2
TH1 = 253; // 设置初值
TL1 = 253;
TR1 = 1; // 开始计时
SCON = 0x50; //工作方式1,波特率9600bps,允许接收
ES = 1;
EA = 1; // 打开所以中断
TI = 0;
RI = 0;
}
/**************************************************/
/*函数:delay_ms() */
/*描述:延迟x毫秒 */
/**************************************************/
void delay_ms(uchar x)
{
uchar i, j;
i = 0;
for(i=0; i<x; i++)
{
j = 250;
while(--j);
j = 250;
while(--j);
}
}
/**************************************************/
/*函数:SPI_RW() */
/*描述:根据SPI协议,写一字节数据到nRF24L01, */
/* 同时从nRF24L01读出一字节 */
/**************************************************/
uchar SPI_RW(uchar byte)
{
uchar i;
for(i=0; i<8; i++) // 循环8次
{
MOSI = (byte & 0x80); // byte最高位输出到MOSI
byte <<= 1; // 低一位移位到最高位
SCK = 1; // 拉高SCK,nRF24L01从MOSI读入1位数据,同时从MISO输出1位数据
byte |= MISO; // 读MISO到byte最低位
SCK = 0; // SCK置低
}
return(byte); // 返回读出的一字节
}
/**************************************************/
/*函数:SPI_RW_Reg() */
/*描述:写数据value到reg寄存器 */
/**************************************************/
uchar SPI_RW_Reg(uchar reg, uchar value)
{
uchar status;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
SPI_RW(value); // 然后写数据到该寄存器
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/**************************************************/
/*函数:SPI_Read() */
/*描述:从reg寄存器读一字节 */
/**************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;
CSN = 0; // CSN置低,开始传输数据
SPI_RW(reg); // 选择寄存器
reg_val = SPI_RW(0); // 然后从该寄存器读数据
CSN = 1; // CSN拉高,结束数据传输
return(reg_val); // 返回寄存器数据
}
/**************************************************/
/*函数:SPI_Read_Buf() */
/*描述:从reg寄存器读出bytes个字节, */
/*通常用来读取接收通道数据或接收/发送地址 */
/**************************************************/
uchar SPI_Read_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
pBuf[i] = SPI_RW(0); // 逐个字节从nRF24L01读出
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/**************************************************/
/*函数:SPI_Write_Buf() */
/*描述:把pBuf缓存中的数据写入到nRF24L01, */
/*通常用来写入发射通道数据或接收/发送地址 */
/**************************************************/
uchar SPI_Write_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
SPI_RW(pBuf[i]); // 逐个字节写入nRF24L01
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/**************************************************/
/*函数:RX_Mode() */
/*描述:这个函数设置nRF24L01为接收模式, */
/* 等待接收发送设备的数据包 */
/**************************************************/
void RX_Mode(void)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 接收设备接收通道0使用和发送设备相同的发送地址
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RX_PW_P0, TX_PLOAD_WIDTH); // 接收通道0选择和发送通道相同有效数据宽度
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // CRC使能,16位CRC校验,上电,接收模式
CE = 1; // 拉高CE启动接收设备
}
/**************************************************/
/*函数:TX_Mode() */
/*描述:这个函数设置nRF24L01为发送模式, */
/* (CE=1持续至少10us), */
/* 130us后启动发射,数据发送结束后, */
/* 发送模块自动转入接收模式等待应答信号。 */
/**************************************************/
void TX_Mode(uchar * BUF)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写入发送地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 为了应答接收设备,接收通道0地址和发送地址相同
SPI_Write_Buf(WR_TX_PLOAD, BUF, TX_PLOAD_WIDTH); // 写数据包到TX FIFO
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x0a); // 自动重发延时等待250us+86us,自动重发10次
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // CRC使能,16位CRC校验,上电
CE = 1;
}
/**************************************************/
/*函数:SendData(uchar *a) */
/*描述:串口发送数据 */
/**************************************************/
SendData(uchar a[TX_PLOAD_WIDTH])
{ int i;
for(i=0;i<TX_PLOAD_WIDTH;i++)
{
outdata[i] = a[i];
}
count = 1;
SBUF=outdata[0];
}
/**************************************************/
/*函数:Check_ACK() */
/*描述:检查接收设备有无接收到数据包, */
/*设定没有收到应答信号是否重发 */
/**************************************************/
uchar Check_ACK(bit clear)
{
while(IRQ);
sta = SPI_RW(NOP); // 返回状态寄存器
if(MAX_RT)
if(clear) // 是否清除TX FIFO,没有清除在复位MAX_RT中断标志后重发
SPI_RW(FLUSH_TX);
SPI_RW_Reg(WRITE_REG + STATUS, sta); // 清除TX_DS或MAX_RT中断标志
IRQ = 1;
if(TX_DS)
return(0x00);
else
return(0xff);
}
请问一下你硬件电路是怎么连得?直接对应端口相连么?还是加了什么电阻?
我看了下除了你比我多了个senddata函数,其他的一样,我就纳闷了……关键是我的SCK MOSI MISO CSN都有脉冲,应该是进行数据传输了,不知道为什么就是不对……唉
这就是无线部分电路
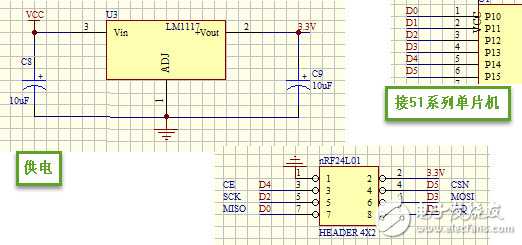
咦,我这就无语了……看来我已经崩溃了……这接线接的差不多……也没看你有什么分压电阻,就是那个3.3V的电容咱俩接的大一样,我接了一个22uf并联一个47uf的……我要疯了……
地址对应的对吗?程序使用前有初始化吗?
大神能详细说下么?
网上的例子我看了好多……也试了就是不行。
我做的是DHT11的无线温湿度传送,这是发送端程序,你可以参考下
#include <reg51.h>
#include <intrins.h>
#include <api.h>
#include <stdio.h>
void Xianshi1602(void);
typedef unsigned char U8; /* defined for unsigned 8-bits integer variable 无符号8位整型变量 */
typedef signed char S8; /* defined for signed 8-bits integer variable 有符号8位整型变量 */
typedef unsigned int U16; /* defined for unsigned 16-bits integer variable 无符号16位整型变量 */
typedef signed int S16; /* defined for signed 16-bits integer variable 有符号16位整型变量 */
typedef unsigned long U32; /* defined for unsigned 32-bits integer variable 无符号32位整型变量 */
typedef signed long S32; /* defined for signed 32-bits integer variable 有符号32位整型变量 */
typedef float F32; /* single precision floating point variable (32bits) 单精度浮点数(32位长度) */
typedef double F64; /* double precision floating point variable (64bits) 双精度浮点数(64位长度) */
#define uchar unsigned char
#define uint unsigned int
#define Data_0_time 4
#define TX_ADR_WIDTH 5 // 5字节宽度的发送/接收地址
#define TX_PLOAD_WIDTH 6 // 数据通道有效数据宽度
uchar code TX_ADDRESS[TX_ADR_WIDTH] = {0x34,0x43,0x10,0x10,0x01}; // 定义一个静态发送地址
uchar RX_BUF[TX_PLOAD_WIDTH];
uchar TX_BUF[TX_PLOAD_WIDTH];
uchar flag;
uchar str_1[TX_PLOAD_WIDTH]="AZainm",outdata[TX_PLOAD_WIDTH]; //第一位为地址位
uchar bdata sta;
int count,h;
U8 U8FLAG,k;
U8 U8count,U8temp;
U8 U8T_data_H,U8T_data_L,U8RH_data_H,U8RH_data_L,U8checkdata;
U8 U8T_data_H_temp,U8T_data_L_temp,U8RH_data_H_temp,U8RH_data_L_temp,U8checkdata_temp;
U8 U8comdata;
U16 U16temp1,U16temp2;
uchar T[3]={0x30,0x30,0x30};
uchar RHA[3]={0x30,0x30,0x30};
sbit P1_6=P1^6 ;//DHT11数据输入口
sbit EN_LCD1602=P2^2;//液晶屏使能
sbit RW_LCD1602=P2^1;//液晶屏读写选择
sbit RS_LCD1602=P2^0;//液晶屏复位
sbit RX_DR=sta^6;
sbit TX_DS=sta^5;
sbit MAX_RT=sta^4;
/**************************************************/
/* 函数: init_io() */
/* 描述:初始化IO */
/**************************************************/
void init_io(void)
{
CE = 0; // 待机
CSN = 1; // SPI禁止
SCK = 0; // SPI时钟置低
IRQ = 1; // 中断复位
}
/**************************************************/
/*函数: init_ser() */
/*描述:初始化串口 */
/**************************************************/
void init_ser()
{
TMOD = 0x20; //定时器T1使用工作方式2
TH1 = 253; // 设置初值
TL1 = 253;
TR1 = 1; // 开始计时
SCON = 0x50; //工作方式1,波特率9600bps,允许接收
ES = 1;
EA = 1; // 打开所以中断
TI = 0;
RI = 0;
}
/**************************************************/
/*函数:delay_ms() */
/*描述:延迟x毫秒 */
/**************************************************/
void delay_ms(uchar x)
{
uchar i, j;
i = 0;
for(i=0; i<x; i++)
{
j = 250;
while(--j);
j = 250;
while(--j);
}
}
/**************************************************/
/*函数:SPI_RW() */
/*描述:根据SPI协议,写一字节数据到nRF24L01, */
/* 同时从nRF24L01读出一字节 */
/**************************************************/
uchar SPI_RW(uchar byte)
{
uchar i;
for(i=0; i<8; i++) // 循环8次
{
MOSI = (byte & 0x80); // byte最高位输出到MOSI
byte <<= 1; // 低一位移位到最高位
SCK = 1; // 拉高SCK,nRF24L01从MOSI读入1位数据,同时从MISO输出1位数据
byte |= MISO; // 读MISO到byte最低位
SCK = 0; // SCK置低
}
return(byte); // 返回读出的一字节
}
/**************************************************/
/*函数:SPI_RW_Reg() */
/*描述:写数据value到reg寄存器 */
/**************************************************/
uchar SPI_RW_Reg(uchar reg, uchar value)
{
uchar status;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
SPI_RW(value); // 然后写数据到该寄存器
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/**************************************************/
/*函数:SPI_Read() */
/*描述:从reg寄存器读一字节 */
/**************************************************/
uchar SPI_Read(uchar reg)
{
uchar reg_val;
CSN = 0; // CSN置低,开始传输数据
SPI_RW(reg); // 选择寄存器
reg_val = SPI_RW(0); // 然后从该寄存器读数据
CSN = 1; // CSN拉高,结束数据传输
return(reg_val); // 返回寄存器数据
}
/**************************************************/
/*函数:SPI_Read_Buf() */
/*描述:从reg寄存器读出bytes个字节, */
/*通常用来读取接收通道数据或接收/发送地址 */
/**************************************************/
uchar SPI_Read_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
pBuf[i] = SPI_RW(0); // 逐个字节从nRF24L01读出
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/**************************************************/
/*函数:SPI_Write_Buf() */
/*描述:把pBuf缓存中的数据写入到nRF24L01, */
/*通常用来写入发射通道数据或接收/发送地址 */
/**************************************************/
uchar SPI_Write_Buf(uchar reg, uchar * pBuf, uchar bytes)
{
uchar status, i;
CSN = 0; // CSN置低,开始传输数据
status = SPI_RW(reg); // 选择寄存器,同时返回状态字
for(i=0; i<bytes; i++)
SPI_RW(pBuf[i]); // 逐个字节写入nRF24L01
CSN = 1; // CSN拉高,结束数据传输
return(status); // 返回状态寄存器
}
/**************************************************/
/*函数:RX_Mode() */
/*描述:这个函数设置nRF24L01为接收模式, */
/* 等待接收发送设备的数据包 */
/**************************************************/
void RX_Mode(void)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 接收设备接收通道0使用和发送设备相同的发送地址
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RX_PW_P0, TX_PLOAD_WIDTH); // 接收通道0选择和发送通道相同有效数据宽度
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0f); // CRC使能,16位CRC校验,上电,接收模式
CE = 1; // 拉高CE启动接收设备
}
/**************************************************/
/*函数:TX_Mode() */
/*描述:这个函数设置nRF24L01为发送模式, */
/* (CE=1持续至少10us), */
/* 130us后启动发射,数据发送结束后, */
/* 发送模块自动转入接收模式等待应答信号。 */
/**************************************************/
void TX_Mode(uchar * BUF)
{
CE = 0;
SPI_Write_Buf(WRITE_REG + TX_ADDR, TX_ADDRESS, TX_ADR_WIDTH); // 写入发送地址
SPI_Write_Buf(WRITE_REG + RX_ADDR_P0, TX_ADDRESS, TX_ADR_WIDTH); // 为了应答接收设备,接收通道0地址和发送地址相同
SPI_Write_Buf(WR_TX_PLOAD, BUF, TX_PLOAD_WIDTH); // 写数据包到TX FIFO
SPI_RW_Reg(WRITE_REG + EN_AA, 0x01); // 使能接收通道0自动应答
SPI_RW_Reg(WRITE_REG + EN_RXADDR, 0x01); // 使能接收通道0
SPI_RW_Reg(WRITE_REG + SETUP_RETR, 0x0a); // 自动重发延时等待250us+86us,自动重发10次
SPI_RW_Reg(WRITE_REG + RF_CH, 40); // 选择射频通道0x40
SPI_RW_Reg(WRITE_REG + RF_SETUP, 0x07); // 数据传输率1Mbps,发射功率0dBm,低噪声放大器增益
SPI_RW_Reg(WRITE_REG + CONFIG, 0x0e); // CRC使能,16位CRC校验,上电
CE = 1;
}
/**************************************************/
/*函数:SendData(uchar *a) */
/*描述:串口发送数据 */
/**************************************************/
SendData(uchar a[TX_PLOAD_WIDTH])
{ int i;
for(i=0;i<TX_PLOAD_WIDTH;i++)
{
outdata[i] = a[i];
}
count = 1;
SBUF=outdata[0];
}
/**************************************************/
/*函数:Check_ACK() */
/*描述:检查接收设备有无接收到数据包, */
/*设定没有收到应答信号是否重发 */
/**************************************************/
uchar Check_ACK(bit clear)
{
while(IRQ);
sta = SPI_RW(NOP); // 返回状态寄存器
if(MAX_RT)
if(clear) // 是否清除TX FIFO,没有清除在复位MAX_RT中断标志后重发
SPI_RW(FLUSH_TX);
SPI_RW_Reg(WRITE_REG + STATUS, sta); // 清除TX_DS或MAX_RT中断标志
IRQ = 1;
if(TX_DS)
return(0x00);
else
return(0xff);
}
/**************************************************/
/* DHT11部分 */
/**************************************************/
void Delay(U16 j)
{
U8 i;
for(;j>0;j--)
{
for(i=0;i<27;i++);
}
}
void Delay_10us(void)
{
U8 i;
i--;
i--;
i--;
i--;
i--;
i--;
}
void COM(void)
{
U8 i;
for(i=0;i<8;i++)
{
U8FLAG=2;
while((!P1_6)&&U8FLAG++);
Delay_10us();
Delay_10us();
Delay_10us();
U8temp=0;
if(P1_6)U8temp=1;
U8FLAG=2;
while((P1_6)&&U8FLAG++);
//超时则跳出for循环
if(U8FLAG==1)break;
//判断数据位是0还是1
// 如果高电平高过预定0高电平值则数据位为 1
U8comdata<<=1;
U8comdata|=U8temp; //0
}//rof
}
//--------------------------------
//-----湿度读取子程序 ------------
//--------------------------------
//----以下变量均为全局变量--------
//----温度高8位== U8T_data_H------
//----温度低8位== U8T_data_L------
//----湿度高8位== U8RH_data_H-----
//----湿度低8位== U8RH_data_L-----
//----校验 8位 == U8checkdata-----
//----调用相关子程序如下----------
//---- Delay();, Delay_10us();,COM();
//--------------------------------
void RH(void)
{
//主机拉低18ms
P1_6=0;
Delay(180);
P1_6=1;
//总线由上拉电阻拉高 主机延时20us
Delay_10us();
Delay_10us();
Delay_10us();
Delay_10us();
//主机设为输入 判断从机响应信号
P1_6=1;
//判断从机是否有低电平响应信号 如不响应则跳出,响应则向下运行
if(!P1_6)//T !
{
U8FLAG=2;
//判断从机是否发出 80us 的低电平响应信号是否结束
while((!P1_6)&&U8FLAG++);
U8FLAG=2;
//判断从机是否发出 80us 的高电平,如发出则进入数据接收状态
while((P1_6)&&U8FLAG++);
//数据接收状态
COM();
U8RH_data_H_temp=U8comdata;
COM();
U8RH_data_L_temp=U8comdata;
COM();
U8T_data_H_temp=U8comdata;
COM();
U8T_data_L_temp=U8comdata;
COM();
U8checkdata_temp=U8comdata;
P1_6=1;
//数据校验
U8temp=(U8T_data_H_temp+U8T_data_L_temp+U8RH_data_H_temp+U8RH_data_L_temp);
if(U8temp==U8checkdata_temp)
{
U8RH_data_H=U8RH_data_H_temp;
U8RH_data_L=U8RH_data_L_temp;
U8T_data_H=U8T_data_H_temp;
U8T_data_L=U8T_data_L_temp;
U8checkdata=U8checkdata_temp;
}//fi
}//fi
}
/*主函数*/
void main()
{
/* 系统初始化 */
init_io(); // 初始化IO
init_ser(); // 初始化串口
RX_Mode(); // 设置为接收模式
Delay(1);
InitLCD1602();//初始化液晶屏
ReadLCD1602();//读液晶屏忙状态
while (1)
{
RH(); //调用温湿度读取子程序
Xianshi1602();//液晶屏显示程序
//串口显示程序
str_1[0]=0x01; //地址位
str_1[1]=U8RH_data_H;
str_1[2]=U8RH_data_L;
str_1[3]=U8T_data_H;
str_1[4]=U8T_data_L;
str_1[5]=U8checkdata;
//读取模块数据周期不应小于 2S
Delay(20000);
for(h=0;h<TX_PLOAD_WIDTH;h++)
{
TX_BUF[h] = str_1[h]; // 数据送到缓存
}
TX_Mode(TX_BUF); // 把nRF24L01设置为发送模式并发送数据
Check_ACK(1); // 等待发送完毕,清除TX FIFO
delay_ms(500);
RX_Mode(); // 设置为接收模式
delay_ms(500);
SendData(TX_BUF);
}
}
/**************************************************/
/*函数:RISINTR() */
/*描述:中断函数 */
/**************************************************/
void RSINTR() interrupt 4 using 2
{
if(TI==1) //发送中断
{
TI=0;
if(count!=TX_PLOAD_WIDTH) //发送完TX_PLOAD_WIDTH位数据
{
SBUF= outdata[count];
count++;
}
}
}
好的,我在仔细看看你的程序,要是再不成我就真得看看硬件电路和通信芯片是否损坏了了,非常感谢
我看了下你的SPI函数和我的一模一样
已成功,谢谢指点