第17章 定时器组
本章节为大家讲解RTX支持的定时器组,或者叫软件定时器,或者叫用户定时器均可。软件定时器的功能比较简单,也容易掌握。被称为定时器组是因为用户可以创建多个定时器,创建的个数是可配置的。
本章教程配套的例子含Cortex-M3内核的STM32F103和Cortex-M4内核的STM32F407。
17.1 定时器组介绍
17.2 定时器组API函数
17.3 实验例程说明
17.4 总结
17.1 定时器组介绍
RTX提供的定时器功能仅支持单次定时器,也就是用户创建了定时器并启动了定时器后,定时时间到将不再重新执行,此定时器会被删除掉并且就执行一次,下次使用要重新的创建,这个就是单次定时器的含义。另外就是单次定时时间到后会调用定时器的回调函数,用户可以回调函数中加入需要执行的工程代码。
使用此定时器组注意以下问题:
(1)定时器回调函数os_tmr_call在文件RTX_Conf_CM.c文件中。
(2)定时器回调函数os_tmr_call中仅支持isr_开头的系统函数,os_开头的不支持,因为回调函数是在滴答定时器中断中执行的。
(3)RTX的定时器仅支持单次,不支持周期性执行,如果需要周期执行,需要重复创建。
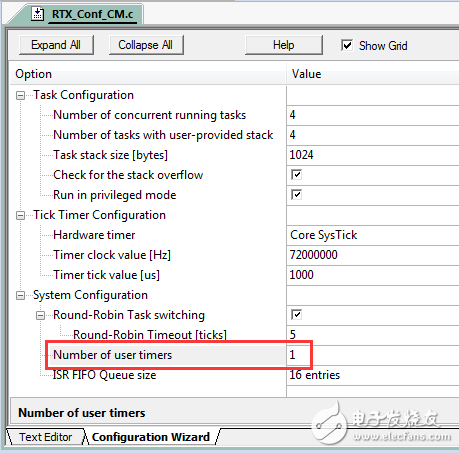
(4)可以创建的定时器个数可以在RTX配置向导中设置:
17.2 定时器组API函数
使用如下3个函数可以实现RTX的定时器组:
os_tmr_create
os_tmr_kill
os_tmr_call
关于这3个函数的讲解及其使用方法可以看教程第3章3.3小节里面说的参考资料rlarm.chm文件
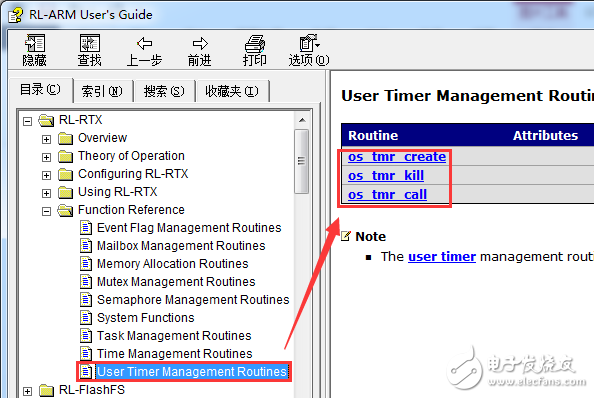
这里我们重点的说一下函数os_tmr_create和os_tmr_call。
17.2.1 函数os_tmr_create
函数原型:
- OS_ID os_tmr_create (
- U16 tcnt, /* 定时器的时钟节拍个数 */
- U16 info ); /* 定时器回调函数的参数,可用于区分不同的定时器 */
函数描述:
函数os_tmr_create用于创建定时器组并启动定时器,定时时间到后调用回调函数os_tmr_call。函数os_tmr_create的第二个参数也会传递给回调函数os_tmr_call用于区分不同的定时器。
(1)第1个参数填写定时器的时钟节拍个数。范围0-0xFFFF。
(2)第2个参数填写回调函数的参数,可用于区分不同的定时器。
(3)定时器创建成功的话会返回定时器的ID标识,失败的话返回NULL。
使用举例:
- #include <rtl.h>
-
- /* 定时器句柄 */
- OS_ID OneShotTimerID1;
-
- __task void task1 (void) {
- ..
- OneShotTimerID1= os_tmr_create (10, 1);
- if (OneShotTimerID1 == NULL) {
- printf ("创建失败\n");
- }
- ..
- }
17.2.2 函数os_tmr_call
函数原型:
- void os_tmr_call (
- U16 info ); /*定时器回调函数的参数,可用于区分不同的定时器*/
函数描述:
当函数os_tmr_create设置的定时时间到后调用回调函数os_tmr_call。函数os_tmr_create的第二个参数也会传递给回调函数os_tmr_call用于区分不同的定时器。此函数执行完毕后,通过函数os_tmr_create创建的定时器会被删除,下次使用需要重新创建。
(1) 此函数的参数不需要用户去添加,系统会自动将函数os_tmr_create第二个参数赋值给这个参数。
使用举例:
- #include <rtl.h>
-
- void os_tmr_call (U16 info) {
- /* 定时器回调函数中仅支持isr_开头的系统函数,os_开头的不支持,此回调函数是在
- 滴答定时器中断中执行的。
- */
- switch(info)
- {
- case 1: /* 参数为1 */
- isr_sem_send (&semaphore);
- break;
-
- case 2: /* 参数为2 */
- bsp_LedToggle(1);
- break;
- }
- }
17.3 实验例程说明
17.3.1 STM32F103开发板实验
配套例子:
V4-416_RTX实验_定时器组
实验目的:
1. 学习RTX的定时器组
2. RTX的定时器仅支持单次,不支持周期性执行,如果需要周期执行,需要重复创建
3. 定时器回调函数os_tmr_call中仅支持isr_开头的系统函数,os_开头的不支持,此回调函数是在滴答定时器中断中执行的。
4. 回调函数os_tmr_call在文件RTX_Conf_CM.c文件中。
实验内容:
1.K1按键按下,串口打印。
2.K2键按下,创建单次定时器,10个系统时钟节拍后在定时器回调函数中给任务AppTaskMsgPro发信号量同步信号。
3.K3键按下,创建单次定时器,10个系统时钟节拍后在定时器回调函数翻转LED1。
4.各个任务实现的功能如下:
AppTaskUserIF任务 :按键消息处理。
AppTaskLED任务 :LED闪烁。
AppTaskMsgPro任务 :消息处理,等待RTX定时器发来的信号量同步信号。
AppTaskStart任务 :启动任务,也是最高优先级任务,这里实现按键扫描。
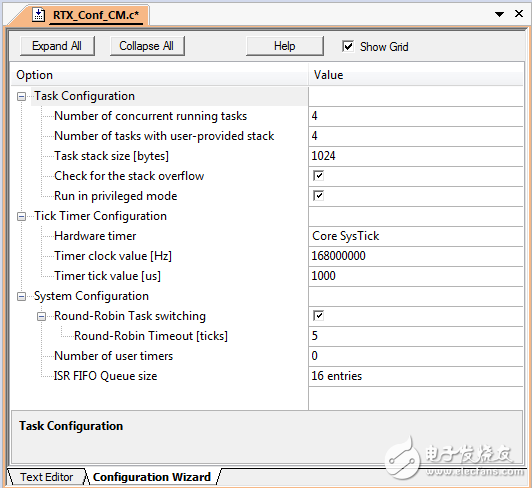
RTX配置:
RTX配置向导详情如下:
Task Configuration
Number of concurrent running tasks
允许创建4个任务,实际创建了如下四个任务:
AppTaskUserIF任务 :按键消息处理。
AppTaskLED任务 :LED闪烁。
AppTaskMsgPro任务 :消息处理,等待RTX定时器发来的信号量同步信号。
AppTaskStart任务 :启动任务,也是最高优先级任务,这里实现按键扫描。
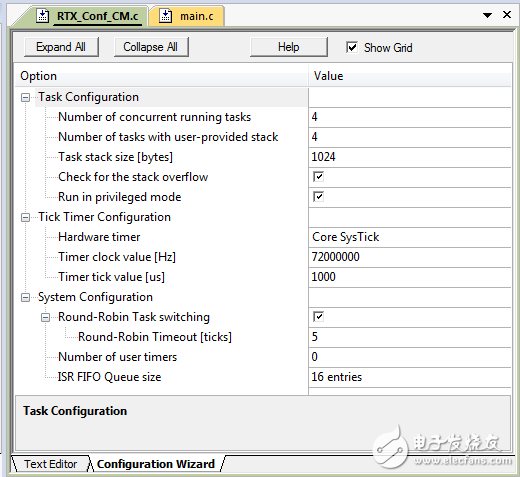
Number of tasks with user-provided stack
创建的4个任务都是采用自定义堆栈方式。
Number of user timers
范围1 – 250,表示用户定时器个数。
这里创建了1个用户定时器。
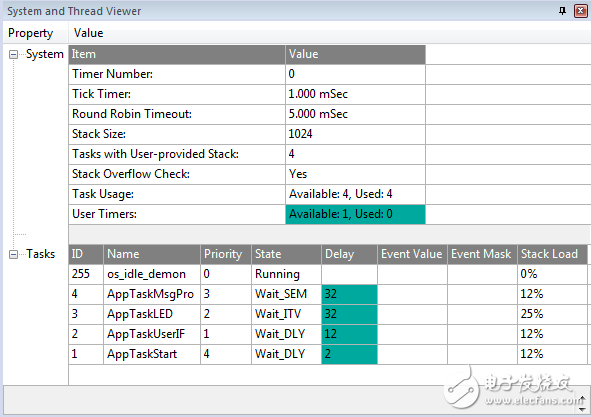
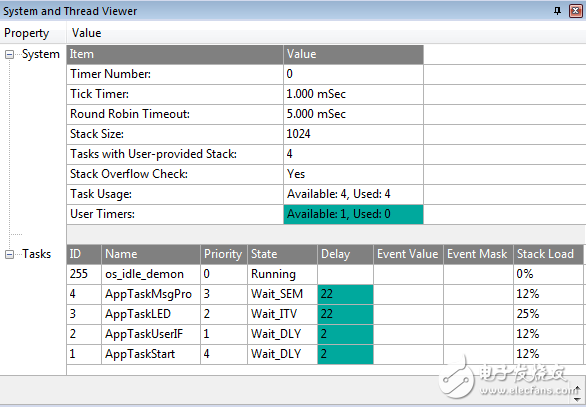
RTX任务调试信息:
程序设计:
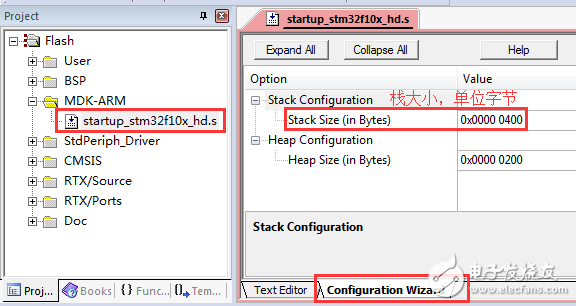
任务栈大小分配:
staticuint64_t AppTaskUserIFStk[512/8]; /* 任务栈 */
staticuint64_t AppTaskLEDStk[256/8]; /* 任务栈 */
staticuint64_t AppTaskMsgProStk[512/8]; /* 任务栈 */
staticuint64_t AppTaskStartStk[512/8]; /* 任务栈 */
将任务栈定义成uint64_t类型可以保证任务栈是8字节对齐的,8字节对齐的含义就是数组的首地址对8求余等于0。如果不做8字节对齐的话,部分C语言库函数,浮点运算和uint64_t类型数据运算会出问题。
系统栈大小分配:
RTX初始化:
- /*
- *********************************************************************************************************
- * 函 数 名: main
- * 功能说明: 标准c程序入口。
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- int main (void)
- {
- /* 初始化外设 */
- bsp_Init();
-
- /* 创建启动任务 */
- os_sys_init_user (AppTaskStart, /* 任务函数 */
- 4, /* 任务优先级 */
- &AppTaskStartStk, /* 任务栈 */
- sizeof(AppTaskStartStk)); /* 任务栈大小,单位字节数 */
- while(1);
- }
RTX任务创建:
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskCreate
- * 功能说明: 创建应用任务
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void AppTaskCreate (void)
- {
- HandleTaskUserIF = os_tsk_create_user(AppTaskUserIF, /* 任务函数 */
- 1, /* 任务优先级 */
- &AppTaskUserIFStk, /* 任务栈 */
- sizeof(AppTaskUserIFStk)); /* 任务栈大小,单位字节数 */
-
- HandleTaskLED = os_tsk_create_user(AppTaskLED, /* 任务函数 */
- 2, /* 任务优先级 */
- &AppTaskLEDStk, /* 任务栈 */
- sizeof(AppTaskLEDStk)); /* 任务栈大小,单位字节数 */
-
- HandleTaskMsgPro = os_tsk_create_user(AppTaskMsgPro, /* 任务函数 */
- 3, /* 任务优先级 */
- &AppTaskMsgProStk, /* 任务栈 */
- sizeof(AppTaskMsgProStk)); /* 任务栈大小,单位字节数 */
- }
创建信号量:
- OS_SEM semaphore;
-
- /*
- *********************************************************************************************************
- * 函 数 名: AppObjCreate
- * 功能说明: 创建任务通信机制
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void AppObjCreate (void)
- {
- /* 创建信号量计数值是0, 用于任务同步 */
- os_sem_init (&semaphore, 0);
-
- }
四个RTX任务的实现,定时器的创建在任务AppTaskUserIF中实现:
- /*
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskUserIF
- * 功能说明: 按键消息处理
- * 形 参: 无
- * 返 回 值: 无
- * 优 先 级: 1 (数值越小优先级越低,这个跟uCOS相反)
- *********************************************************************************************************
- */
- __task void AppTaskUserIF(void)
- {
- uint8_t ucKeyCode;
-
- while(1)
- {
- ucKeyCode = bsp_GetKey();
-
- if (ucKeyCode != KEY_NONE)
- {
- switch (ucKeyCode)
- {
- /* K1键按下,打印调试说明 */
- case KEY_DOWN_K1:
- printf("K1键按下,使用MDK中自带的RTX调试组件,请务必使用MDK4.74版本进行调试\r\n");
- break;
-
- /*
- K2键按下,创建单次定时器,定时时间10个系统时钟节拍, 在定时器回调函数中给任务
- AppTaskMsgPro发信号量同步信号
- */
- case KEY_DOWN_K2:
- printf("K2键按下,创建单次定时器,10个系统时钟节拍后在定时器回调函数中给任务
- AppTaskMsgPro发信号量同步信号\r\n");
- /*
- 1. RTX的定时器仅支持单次,不支持周期性执行,如果需要周期执行,需要重复创建
- 2. 定时器回调函数os_tmr_call中仅支持isr_开头的系统函数,os_开头的不支持,此回调函
- 数是在滴答定时器中断中执行的。
- 3. 回调函数os_tmr_call在文件RTX_Conf_CM.c文件中。
- */
- OneShotTimerID1 = os_tmr_create(10, /* 定时10个系统时钟节拍 */
- 1); /* 回调函数的参数,可用于区分不同的定时器 */
-
- if (OneShotTimerID1 == NULL)
- {
- /* 没有创建成功,用户可以在这里加入创建失败的处理机制 */
- }
- break;
-
- case KEY_DOWN_K3:
- printf("K3键按下,创建单次定时器,10个系统时钟节拍后在定时器回调函数翻转LED1\r\n");
- OneShotTimerID2 = os_tmr_create(10, /* 定时10个系统时钟节拍 */
- 2); /* 回调函数的参数,可用于区分不同的定时器 */
-
- if (OneShotTimerID2 == NULL)
- {
- /* 没有创建成功,用户可以在这里加入创建失败的处理机制 */
- }
- break;
-
- /* 其他的键值不处理 */
- default:
- break;
- }
- }
-
- os_dly_wait(20);
- }
- }
-
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskLED
- * 功能说明: LED闪烁。
- * 形 参: 无
- * 返 回 值: 无
- * 优 先 级: 2
- *********************************************************************************************************
- */
- __task void AppTaskLED(void)
- {
- const uint16_t usFrequency = 200; /* 延迟周期 */
-
- /* 设置延迟周期 */
- os_itv_set(usFrequency);
-
- while(1)
- {
- bsp_LedToggle(2);
- bsp_LedToggle(3);
-
- /* os_itv_wait是绝对延迟,os_dly_wait是相对延迟。*/
- os_itv_wait();
- }
- }
-
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskMsgPro
- * 功能说明: 消息处理,等待RTX定时器发来的信号量同步信号
- * 形 参: 无
- * 返 回 值: 无
- * 优 先 级: 3
- *********************************************************************************************************
- */
- __task void AppTaskMsgPro(void)
- {
- OS_RESULT xResult;
- const uint16_t usMaxBlockTime = 200; /* 延迟周期 */
-
- while(1)
- {
- xResult = os_sem_wait (&semaphore, usMaxBlockTime);
-
- switch (xResult)
- {
- /* 无需等待接受到信号量同步信号 */
- case OS_R_OK:
- printf("无需等待接受到信号量同步信号\r\n");
- break;
-
- /* 信号量不可用,usMaxBlockTime等待时间内收到信号量同步信号 */
- case OS_R_SEM:
- printf("信号量不可用,usMaxBlockTime等待时间内收到信号量同步信号\r\n");
- break;
-
- /* 超时 */
- case OS_R_TMO:
- bsp_LedToggle(4);
- break;
-
- /* 其他值不处理 */
- default:
- break;
- }
- }
- }
-
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskStart
- * 功能说明: 启动任务,也就是最高优先级任务。这里实现按键扫描。
- * 形 参: 无
- * 返 回 值: 无
- * 优 先 级: 4
- *********************************************************************************************************
- */
- __task void AppTaskStart(void)
- {
- /* 创建任务 */
- AppTaskCreate();
-
- /* 创建任务通信机制 */
- AppObjCreate();
-
- while(1)
- {
- /* 按键扫描 */
- bsp_KeyScan();
- os_dly_wait(10);
- }
- }
定时器回调函数的实现,在文件RTX_Conf_CM.c:
- /*--------------------------- os_tmr_call -----------------------------------*/
- #include "bsp.h"
- extern OS_SEM semaphore;
- void os_tmr_call (U16 info) {
- /* This function is called when the user timer has expired. Parameter */
- /* 'info' holds the value, defined when the timer was created. */
-
- /* HERE: include optional user code to be executed on timeout. */
- /* 定时器回调函数中仅支持isr_开头的系统函数,os_开头的不支持,此回调函数是在
- 滴答定时器中断中执行的。
- */
- switch(info)
- {
- case 1: /* 参数为1 */
- isr_sem_send (&semaphore);
- break;
-
- case 2: /* 参数为2 */
- bsp_LedToggle(1);
- break;
- }
- }
17.3.2 STM32F407开发板实验
配套例子:
V4-416_RTX实验_定时器组
实验目的:
1. 学习RTX的定时器组。
2. RTX的定时器仅支持单次,不支持周期性执行,如果需要周期执行,需要重复创建。
3. 定时器回调函数os_tmr_call中仅支持isr_开头的系统函数,os_开头的不支持,此回调函数是在滴答定时器中断中执行的。
4. 回调函数os_tmr_call在文件RTX_Conf_CM.c文件中。
实验内容:
1.K1按键按下,串口打印。
2.K2键按下,创建单次定时器,10个系统时钟节拍后在定时器回调函数中给任务AppTaskMsgPro发信号量同步信号。
3.K3键按下,创建单次定时器,10个系统时钟节拍后在定时器回调函数翻转LED1。
4.各个任务实现的功能如下:
AppTaskUserIF任务 :按键消息处理。
AppTaskLED任务 :LED闪烁。
AppTaskMsgPro任务 :消息处理,等待RTX定时器发来的信号量同步信号。
AppTaskStart任务 :启动任务,也是最高优先级任务,这里实现按键扫描。
RTX配置:
RTX配置向导详情如下:
Task Configuration
Number of concurrent running tasks
允许创建4个任务,实际创建了如下四个任务:
AppTaskUserIF任务 :按键消息处理。
AppTaskLED任务 :LED闪烁。
AppTaskMsgPro任务 :消息处理,等待RTX定时器发来的信号量同步信号。
AppTaskStart任务 :启动任务,也是最高优先级任务,这里实现按键扫描。
Number of tasks with user-provided stack
创建的4个任务都是采用自定义堆栈方式。
Number of user timers
范围1 – 250,表示用户定时器个数。
这里创建了1个用户定时器。
RTX任务调试信息:
程序设计:
任务栈大小分配:
staticuint64_t AppTaskUserIFStk[512/8]; /* 任务栈 */
staticuint64_t AppTaskLEDStk[256/8]; /* 任务栈 */
staticuint64_t AppTaskMsgProStk[512/8]; /* 任务栈 */
staticuint64_t AppTaskStartStk[512/8]; /* 任务栈 */
将任务栈定义成uint64_t类型可以保证任务栈是8字节对齐的,8字节对齐的含义就是数组的首地址对8求余等于0。如果不做8字节对齐的话,部分C语言库函数,浮点运算和uint64_t类型数据运算会出问题。
系统栈大小分配:
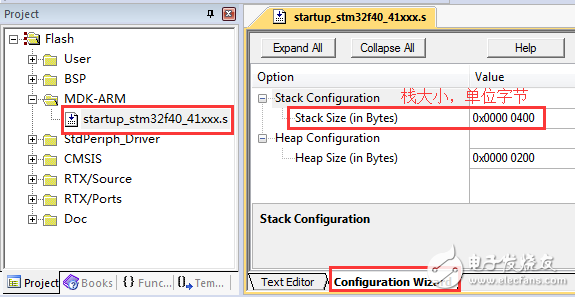
RTX初始化:
- /*
- *********************************************************************************************************
- * 函 数 名: main
- * 功能说明: 标准c程序入口。
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- int main (void)
- {
- /* 初始化外设 */
- bsp_Init();
-
- /* 创建启动任务 */
- os_sys_init_user (AppTaskStart, /* 任务函数 */
- 4, /* 任务优先级 */
- &AppTaskStartStk, /* 任务栈 */
- sizeof(AppTaskStartStk)); /* 任务栈大小,单位字节数 */
- while(1);
- }
RTX任务创建:
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskCreate
- * 功能说明: 创建应用任务
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void AppTaskCreate (void)
- {
- HandleTaskUserIF = os_tsk_create_user(AppTaskUserIF, /* 任务函数 */
- 1, /* 任务优先级 */
- &AppTaskUserIFStk, /* 任务栈 */
- sizeof(AppTaskUserIFStk)); /* 任务栈大小,单位字节数 */
-
- HandleTaskLED = os_tsk_create_user(AppTaskLED, /* 任务函数 */
- 2, /* 任务优先级 */
- &AppTaskLEDStk, /* 任务栈 */
- sizeof(AppTaskLEDStk)); /* 任务栈大小,单位字节数 */
-
- HandleTaskMsgPro = os_tsk_create_user(AppTaskMsgPro, /* 任务函数 */
- 3, /* 任务优先级 */
- &AppTaskMsgProStk, /* 任务栈 */
- sizeof(AppTaskMsgProStk)); /* 任务栈大小,单位字节数 */
- }
创建信号量:
- OS_SEM semaphore;
-
- /*
- *********************************************************************************************************
- * 函 数 名: AppObjCreate
- * 功能说明: 创建任务通信机制
- * 形 参: 无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void AppObjCreate (void)
- {
- /* 创建信号量计数值是0, 用于任务同步 */
- os_sem_init (&semaphore, 0);
-
- }
四个RTX任务的实现,定时器的创建在任务AppTaskUserIF中实现:
- /*
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskUserIF
- * 功能说明: 按键消息处理
- * 形 参: 无
- * 返 回 值: 无
- * 优 先 级: 1 (数值越小优先级越低,这个跟uCOS相反)
- *********************************************************************************************************
- */
- __task void AppTaskUserIF(void)
- {
- uint8_t ucKeyCode;
-
- while(1)
- {
- ucKeyCode = bsp_GetKey();
-
- if (ucKeyCode != KEY_NONE)
- {
- switch (ucKeyCode)
- {
- /* K1键按下,打印调试说明 */
- case KEY_DOWN_K1:
- printf("K1键按下,使用MDK中自带的RTX调试组件,请务必使用MDK4.74版本进行调试\r\n");
- break;
-
- /*
- K2键按下,创建单次定时器,定时时间10个系统时钟节拍, 在定时器回调函数中给任务
- AppTaskMsgPro发信号量同步信号
- */
- case KEY_DOWN_K2:
- printf("K2键按下,创建单次定时器,10个系统时钟节拍后在定时器回调函数中给任务
- AppTaskMsgPro发信号量同步信号\r\n");
- /*
- 1. RTX的定时器仅支持单次,不支持周期性执行,如果需要周期执行,需要重复创建
- 2. 定时器回调函数os_tmr_call中仅支持isr_开头的系统函数,os_开头的不支持,此回调函
- 数是在滴答定时器中断中执行的。
- 3. 回调函数os_tmr_call在文件RTX_Conf_CM.c文件中。
- */
- OneShotTimerID1 = os_tmr_create(10, /* 定时10个系统时钟节拍 */
- 1); /* 回调函数的参数,可用于区分不同的定时器 */
-
- if (OneShotTimerID1 == NULL)
- {
- /* 没有创建成功,用户可以在这里加入创建失败的处理机制 */
- }
- break;
-
- case KEY_DOWN_K3:
- printf("K3键按下,创建单次定时器,10个系统时钟节拍后在定时器回调函数翻转LED1\r\n");
- OneShotTimerID2 = os_tmr_create(10, /* 定时10个系统时钟节拍 */
- 2); /* 回调函数的参数,可用于区分不同的定时器 */
-
- if (OneShotTimerID2 == NULL)
- {
- /* 没有创建成功,用户可以在这里加入创建失败的处理机制 */
- }
- break;
-
- /* 其他的键值不处理 */
- default:
- break;
- }
- }
-
- os_dly_wait(20);
- }
- }
-
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskLED
- * 功能说明: LED闪烁。
- * 形 参: 无
- * 返 回 值: 无
- * 优 先 级: 2
- *********************************************************************************************************
- */
- __task void AppTaskLED(void)
- {
- const uint16_t usFrequency = 200; /* 延迟周期 */
-
- /* 设置延迟周期 */
- os_itv_set(usFrequency);
-
- while(1)
- {
- bsp_LedToggle(2);
- bsp_LedToggle(3);
-
- /* os_itv_wait是绝对延迟,os_dly_wait是相对延迟。*/
- os_itv_wait();
- }
- }
-
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskMsgPro
- * 功能说明: 消息处理,等待RTX定时器发来的信号量同步信号
- * 形 参: 无
- * 返 回 值: 无
- * 优 先 级: 3
- *********************************************************************************************************
- */
- __task void AppTaskMsgPro(void)
- {
- OS_RESULT xResult;
- const uint16_t usMaxBlockTime = 200; /* 延迟周期 */
-
- while(1)
- {
- xResult = os_sem_wait (&semaphore, usMaxBlockTime);
-
- switch (xResult)
- {
- /* 无需等待接受到信号量同步信号 */
- case OS_R_OK:
- printf("无需等待接受到信号量同步信号\r\n");
- break;
-
- /* 信号量不可用,usMaxBlockTime等待时间内收到信号量同步信号 */
- case OS_R_SEM:
- printf("信号量不可用,usMaxBlockTime等待时间内收到信号量同步信号\r\n");
- break;
-
- /* 超时 */
- case OS_R_TMO:
- bsp_LedToggle(4);
- break;
-
- /* 其他值不处理 */
- default:
- break;
- }
- }
- }
-
- /*
- *********************************************************************************************************
- * 函 数 名: AppTaskStart
- * 功能说明: 启动任务,也就是最高优先级任务。这里实现按键扫描。
- * 形 参: 无
- * 返 回 值: 无
- * 优 先 级: 4
- *********************************************************************************************************
- */
- __task void AppTaskStart(void)
- {
- /* 创建任务 */
- AppTaskCreate();
-
- /* 创建任务通信机制 */
- AppObjCreate();
-
- while(1)
- {
- /* 按键扫描 */
- bsp_KeyScan();
- os_dly_wait(10);
- }
- }
定时器回调函数的实现,在文件RTX_Conf_CM.c:
- /*--------------------------- os_tmr_call -----------------------------------*/
- #include "bsp.h"
- extern OS_SEM semaphore;
- void os_tmr_call (U16 info) {
- /* This function is called when the user timer has expired. Parameter */
- /* 'info' holds the value, defined when the timer was created. */
-
- /* HERE: include optional user code to be executed on timeout. */
- /* 定时器回调函数中仅支持isr_开头的系统函数,os_开头的不支持,此回调函数是在
- 滴答定时器中断中执行的。
- */
- switch(info)
- {
- case 1: /* 参数为1 */
- isr_sem_send (&semaphore);
- break;
-
- case 2: /* 参数为2 */
- bsp_LedToggle(1);
- break;
- }
- }
17.4 总结
本章节主要为大家讲解了软件定时器,对于初学者来说,比较容易掌握。