IntoRobot初次上电
时间:10-02
整理:3721RD
点击:
上回对IntoRobot进行了开箱展示,这次对IntoRobot初次上电进行一些简单的介绍。
首先,将IntoRobot和PC间通过USB数据线进行连接,PC对开发板进行供电,如图1所示。
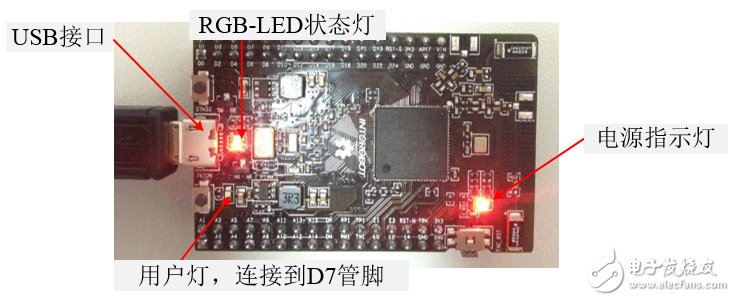
图1 IntoRobot上电
开发板上共有3个LED灯,分别为RGB-LED状态灯、用户灯和电源指示灯。其中,RGB-LED状态灯表明开发板的工作状态,而用户灯连接到D7管脚,可以用来进行程序的调试,电源指示灯则用来指示板子的供电状态。
RGB-LED状态灯有多种状态组合,分别如下:
通常第一次上电后开发板应当按照红-绿-蓝-浅蓝的顺序启动,这表明开发板正常启动,约30s后,开发板的RGB-LED状态灯将出现红色闪烁,这表明开发板正常运行并处于配置模式,此时可以搜索到一个默认名为IntoRobot-AtomXXXX的WIFI热点,我所试用的开发板其WIFI热点名为IntoRobot-Atom07C8,WIFI默认密码为intorobot,如图2所示。

图2 开发板WIFI热点
PC机连接该WIFI,并且使用虚拟机登陆Linux系统,开发板默认IP为192.168.8.1,为了使得Linux系统可以和开发板进行通信,需设置Linux系统的IP和开发板的IP处于同一网段,如图3所示。

图3 设置虚拟机Linux的IP
初次登录开发板时,由于出厂的OpenWrt默认不设置密码,第一次需使用telnet登录,并设置密码,通过# telnet 192.168.8.1 来登录开发板,通过# passwd命令来设置开发板的密码,如图4和图5所示。

图4 telnet登录开发板
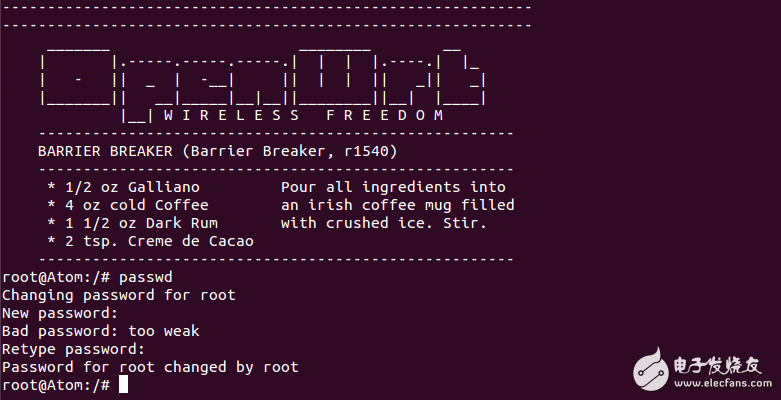
图5 passwd设置开发板密码
设置了密码后,重新登录开发板,此时需使用ssh命令来登录,并且会要求输入刚刚设置的密码,如图6所示。
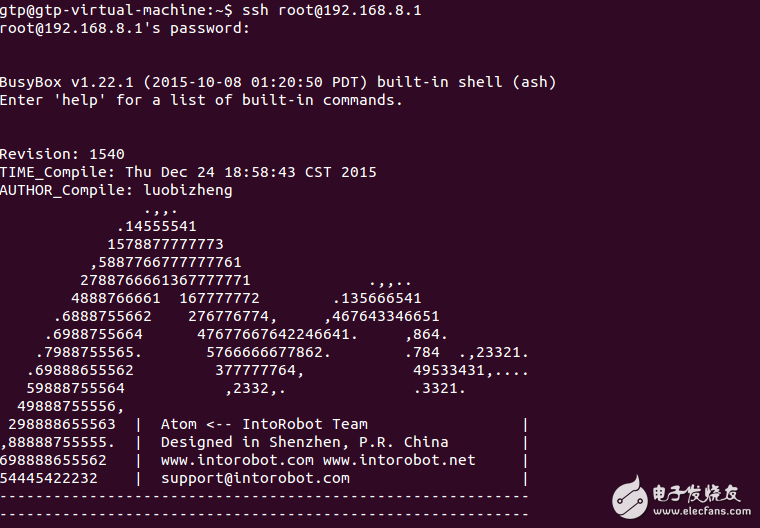
图6 ssh登录开发板
使用简单的Linux命令来查看开发板系统的内容,如图7所示。

图7 Linux常用命令查看开发板系统内容
好了,今天就说到这里,下回咱们继续,谢谢大家。
首先,将IntoRobot和PC间通过USB数据线进行连接,PC对开发板进行供电,如图1所示。
图1 IntoRobot上电
开发板上共有3个LED灯,分别为RGB-LED状态灯、用户灯和电源指示灯。其中,RGB-LED状态灯表明开发板的工作状态,而用户灯连接到D7管脚,可以用来进行程序的调试,电源指示灯则用来指示板子的供电状态。
RGB-LED状态灯有多种状态组合,分别如下:
- 红-绿-蓝-浅蓝:Atom 正在启动
- 红色闪烁: Atom 进入配置模式
- 黄色闪烁: Atom 更新STM32的固件程序
- 黄色闪烁-黄色长亮:Atom 进行OpenWrt固件升级
- 绿色闪烁: Atom 尝试连接网络
- 浅蓝色闪烁: Atom 脱网工作
- 蓝色闪烁: Atom 尝试连接到云平台
- 白色闪烁: Atom 连接到云平台
通常第一次上电后开发板应当按照红-绿-蓝-浅蓝的顺序启动,这表明开发板正常启动,约30s后,开发板的RGB-LED状态灯将出现红色闪烁,这表明开发板正常运行并处于配置模式,此时可以搜索到一个默认名为IntoRobot-AtomXXXX的WIFI热点,我所试用的开发板其WIFI热点名为IntoRobot-Atom07C8,WIFI默认密码为intorobot,如图2所示。
图2 开发板WIFI热点
PC机连接该WIFI,并且使用虚拟机登陆Linux系统,开发板默认IP为192.168.8.1,为了使得Linux系统可以和开发板进行通信,需设置Linux系统的IP和开发板的IP处于同一网段,如图3所示。
图3 设置虚拟机Linux的IP
初次登录开发板时,由于出厂的OpenWrt默认不设置密码,第一次需使用telnet登录,并设置密码,通过# telnet 192.168.8.1 来登录开发板,通过# passwd命令来设置开发板的密码,如图4和图5所示。
图4 telnet登录开发板
图5 passwd设置开发板密码
设置了密码后,重新登录开发板,此时需使用ssh命令来登录,并且会要求输入刚刚设置的密码,如图6所示。
图6 ssh登录开发板
使用简单的Linux命令来查看开发板系统的内容,如图7所示。
图7 Linux常用命令查看开发板系统内容
好了,今天就说到这里,下回咱们继续,谢谢大家。
