第20章 MatrixFunctions的使用(二)
本期教程主要讲解矩阵运算中的放缩,乘法和转置。
20.1 矩阵放缩MatScale
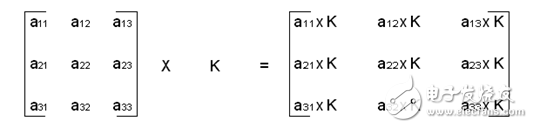
20.2 矩阵乘法MatMult
20.3 转置矩阵MatTrans
20.4 总结
20.1 矩阵放缩 MatScale
20.1.1 arm_mat_scale_f32
公式描述:
函数定义如下:
arm_status arm_mat_scale_f32(
const arm_matrix_instance_f32 * pSrc,
float32_t scale,
arm_matrix_instance_f32 * pDst)
参数定义:
[in] *pSrc points to input matrix structure
[in] scale scale factor to be applied
[out] *pDst points to output matrix structure
return The function returns either<code>ARM_MATH_SIZE_MISMATCH</code>
20.1.2 arm_mat_scale_q31
函数定义如下:
arm_statusarm_mat_scale_q31(
const arm_matrix_instance_q31 * pSrc,
q31_t scaleFract,
int32_t shift,
arm_matrix_instance_q31 * pDst)
参数定义:
[in] *pSrc points to input matrix
[in] scaleFract fractional portion of the scale factor
[in] shift number of bits to shift the resultby
[out] *pDst points to output matrix structure
return The function returns either
注意事项:
1. 两个1.31格式的数据相乘产生2.62格式的数据,最终结果要做偏移和饱和运算产生1.31格式数据。
2. 定点数的最终放缩比例计算是:scale = scaleFract *2^shift.
20.1.3 arm_mat_scale_q15
函数定义如下:
arm_statusarm_mat_scale_q15(
const arm_matrix_instance_q15 * pSrc,
q15_t scaleFract,
int32_t shift,
arm_matrix_instance_q15 * pDst)
参数定义:
[in,out] *S pointsto an instance of the floating-point matrix structure.
[in] nRows number of rows in the matrix.
[in] nColumns number of columns in thematrix.
[in] *pData points to the matrix data array.
注意事项:
1. 两个1.15格式的数据相乘产生2.30格式的数据,最终结果要做偏移和饱和运算产生1.15格式数据。
2. 定点数的最终放缩比例计算是:scale = scaleFract *2^shift.
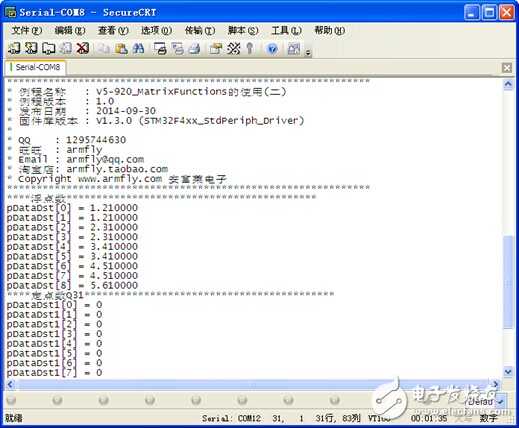
20.1.4 实例讲解
实验目的:
1. 学习MatrixFunctions中矩阵的放缩
实验内容:
1. 按下按键K1, 串口打印函数DSP_MatScale的输出结果
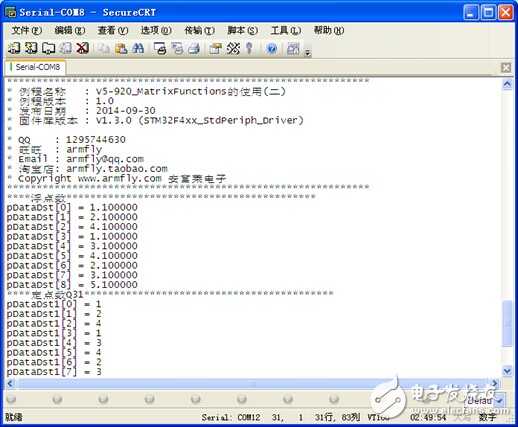
实验现象:
通过窗口上位机软件SecureCRT(V5光盘里面有此软件)查看打印信息现象如下:
程序设计:
- /*
- *********************************************************************************************************
- * 函 数 名: DSP_MatScale
- * 功能说明: 矩阵放缩
- * 形 参:无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void DSP_MatScale(void)
- {
- uint8_t i;
-
- /****浮点数数组******************************************************************/
- float32_t pDataA[9] = {1.1f, 1.1f, 2.1f, 2.1f, 3.1f, 3.1f, 4.1f, 4.1f, 5.1f};
- float32_t scale = 1.1f;
- float32_t pDataDst[9];
-
- arm_matrix_instance_f32 pSrcA; //3行3列数据
- arm_matrix_instance_f32 pDst;
-
- /****定点数Q31数组******************************************************************/
- q31_t pDataA1[9] = {1, 1, 2, 2, 3, 3, 4, 4, 5};
- q31_t scaleFract = 10;
- int32_t shift = 0;
- q31_t pDataDst1[9];
-
- arm_matrix_instance_q31 pSrcA1; //3行3列数据
- arm_matrix_instance_q31 pDst1;
-
- /****定点数Q15数组******************************************************************/
- q15_t pDataA2[9] = {1, 1, 2, 2, 3, 3, 4, 4, 5};
- q15_t scaleFract1 = 10;
- int32_t shift1 = 0;
- q15_t pDataDst2[9];
-
- arm_matrix_instance_q15 pSrcA2; //3行3列数据
- arm_matrix_instance_q15 pDst2;
-
- /****浮点数***********************************************************************/
- pSrcA.numCols = 3;
- pSrcA.numRows = 3;
- pSrcA.pData = pDataA;
-
- pDst.numCols = 3;
- pDst.numRows = 3;
- pDst.pData = pDataDst;
-
- printf("****浮点数******************************************\r\n");
- arm_mat_scale_f32(&pSrcA, scale, &pDst);
- for(i = 0; i < 9; i++)
- {
- printf("pDataDst[%d] = %f\r\n", i, pDataDst[i]);
- }
-
-
- /****定点数Q31***********************************************************************/
- pSrcA1.numCols = 3;
- pSrcA1.numRows = 3;
- pSrcA1.pData = pDataA1;
-
- pDst1.numCols = 3;
- pDst1.numRows = 3;
- pDst1.pData = pDataDst1;
-
- printf("****定点数Q31******************************************\r\n");
- arm_mat_scale_q31(&pSrcA1, scaleFract, shift, &pDst1);
- for(i = 0; i < 9; i++)
- {
- printf("pDataDst1[%d] = %d\r\n", i, pDataDst1[i]);
- }
-
- /****定点数Q15***********************************************************************/
- pSrcA2.numCols = 3;
- pSrcA2.numRows = 3;
- pSrcA2.pData = pDataA2;
-
- pDst2.numCols = 3;
- pDst2.numRows = 3;
- pDst2.pData = pDataDst2;
-
- printf("****定点数Q15******************************************\r\n");
- arm_mat_scale_q15(&pSrcA2, scaleFract1, shift1, &pDst2);
- for(i = 0; i < 9; i++)
- {
- printf("pDataDst2[%d] = %d\r\n", i, pDataDst2[i]);
- }
- }
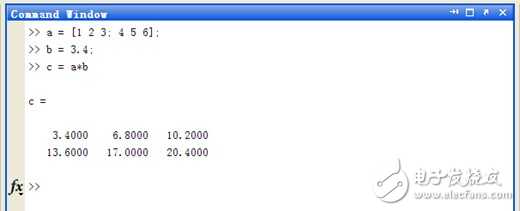
1. 下面通过matlab来实现矩阵的放缩:
20.2 矩阵乘法 MatMult
20.2.1 arm_mat_mult_f32
公式描述:

函数定义如下:
arm_statusarm_mat_mult_f32(
const arm_matrix_instance_f32 * pSrcA,
const arm_matrix_instance_f32 * pSrcB,
arm_matrix_instance_f32 * pDst)
参数定义:
[in] *pSrcA points to the first input matrixstructure
[in] *pSrcB points to the second input matrixstructure
[out] *pDst points to output matrix structure
return The function returns either
注意事项:
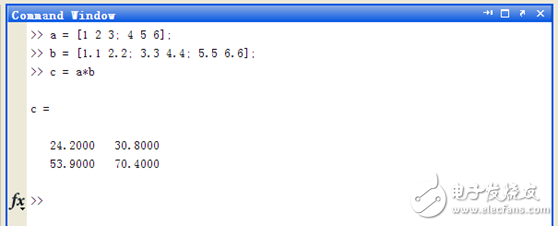
1. 两个矩阵M x N和N x P相乘的结果是M x P.(必须保证一个矩形的列数等于另一个矩阵的行数)。
20.2.2 arm_mat_mult_q31
函数定义如下:
arm_statusarm_mat_mult_q31(
const arm_matrix_instance_q31 * pSrcA,
const arm_matrix_instance_q31 * pSrcB,
arm_matrix_instance_q31 * pDst)
参数定义:
[in] *pSrcA points to the first input matrixstructure
[in] *pSrcB points to the second input matrixstructure
[out] *pDst points to output matrix structure
return Thefunction returns either
注意事项:
1. 两个1.31格式的数据相乘产生2.62格式的数据,最终结果要做偏移和饱和运算产生1.31格式数据。
2. 两个矩阵M x N和N x P相乘的结果是M x P.(必须保证一个矩形的列数等于另一个矩阵的行数)。
20.2.3 arm_mat_mult_q15
函数定义如下:
arm_statusarm_mat_mult_q15(
const arm_matrix_instance_q15 * pSrcA,
const arm_matrix_instance_q15 * pSrcB,
arm_matrix_instance_q15 * pDst,
q15_t * pState CMSIS_UNUSED)
参数定义:
[in] *pSrcA points to the first input matrixstructure
[in] *pSrcB points to the second input matrixstructure
[out] *pDst points to output matrix structure
[in] *pState points to the array for storing intermediateresults
return The function returns either
注意事项:
1. 两个1.15格式数据相乘是2.30格式,函数的内部使用了64位的累加器,那个就是34.30格式,最终结果将低15位截取掉并作饱和处理为1.15格式。
2. 两个矩阵M x N和N x P相乘的结果是M x P.(必须保证一个矩形的列数等于另一个矩阵的行数)。
20.2.4 arm_mat_mult_fast_q31
函数定义如下:
arm_statusarm_mat_mult_fast_q31(
const arm_matrix_instance_q31 * pSrcA,
const arm_matrix_instance_q31 * pSrcB,
arm_matrix_instance_q31 * pDst)
参数定义:
[in] *pSrcA points to the first input matrixstructure
[in] *pSrcB points to the second input matrixstructure
[out] *pDst points to output matrix structure
return Thefunction returns either
注意事项:
1. 两个1.31格式的数据相乘产生2.62格式的数据,最终结果要做偏移和饱和运算产生1.31格式数据。
2. 两个矩阵M x N和N x P相乘的结果是M x P.(必须保证一个矩形的列数等于另一个矩阵的行数)。
3. 函数arm_mat_mult_fast_q31是arm_mat_mult_q31的快速算法。
20.2.5 arm_mat_mult_fast_q15
函数定义如下:
arm_statusarm_mat_mult_fast_q15(
const arm_matrix_instance_q15 * pSrcA,
const arm_matrix_instance_q15 * pSrcB,
arm_matrix_instance_q15 * pDst,
q15_t * pState)
参数定义:
[in] *pSrcA points to the first input matrixstructure
[in] *pSrcB points to the second input matrixstructure
[out] *pDst points to output matrix structure
[in] *pState points to the array for storing intermediateresults
return The function returns either
注意事项:
1. 两个1.15格式数据相乘是2.30格式,函数的内部使用了64位的累加器,那个就是34.30格式,最终结果将低15位截取掉并作饱和处理为1.15格式。
2. 两个矩阵M x N和N x P相乘的结果是M x P.(必须保证一个矩形的列数等于另一个矩阵的行数)。
3. 函数arm_mat_mult_fast_q15是arm_mat_mult_q15的快速算法。
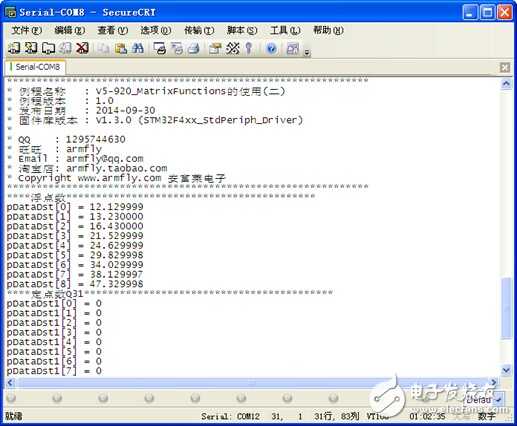
20.2.6 实例讲解
实验目的:
1. 学习MatrixFunctions中矩阵乘法
实验内容:
1. 按下按键K2, 串口打印函数DSP_MatMult的输出结果
实验现象:
通过窗口上位机软件SecureCRT(V5光盘里面有此软件)查看打印信息现象如下:
程序设计:
- /*
- *********************************************************************************************************
- * 函 数 名: DSP_MatMult
- * 功能说明: 矩阵乘法
- * 形 参:无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void DSP_MatMult(void)
- {
- uint8_t i;
-
- /****浮点数数组******************************************************************/
- float32_t pDataA[9] = {1.1f, 1.1f, 2.1f, 2.1f, 3.1f, 3.1f, 4.1f, 4.1f, 5.1f};
- float32_t pDataB[9] = {1.1f, 1.1f, 2.1f, 2.1f, 3.1f, 3.1f, 4.1f, 4.1f, 5.1f};
- float32_t pDataDst[9];
-
- arm_matrix_instance_f32 pSrcA; //3行3列数据
- arm_matrix_instance_f32 pSrcB; //3行3列数据
- arm_matrix_instance_f32 pDst;
-
- /****定点数Q31数组******************************************************************/
- q31_t pDataA1[9] = {1, 1, 2, 2, 3, 3, 4, 4, 5};
- q31_t pDataB1[9] = {1, 1, 2, 2, 3, 3, 4, 4, 5};
- q31_t pDataDst1[9];
-
- arm_matrix_instance_q31 pSrcA1; //3行3列数据
- arm_matrix_instance_q31 pSrcB1; //3行3列数据
- arm_matrix_instance_q31 pDst1;
-
- /****定点数Q15数组******************************************************************/
- q15_t pDataA2[9] = {1, 1, 2, 2, 3, 3, 4, 4, 5};
- q15_t pDataB2[9] = {1, 1, 2, 2, 3, 3, 4, 4, 5};
- q15_t pDataDst2[9];
-
- arm_matrix_instance_q15 pSrcA2; //3行3列数据
- arm_matrix_instance_q15 pSrcB2; //3行3列数据
- arm_matrix_instance_q15 pDst2;
- q15_t pState;
-
- /****浮点数***********************************************************************/
- pSrcA.numCols = 3;
- pSrcA.numRows = 3;
- pSrcA.pData = pDataA;
-
- pSrcB.numCols = 3;
- pSrcB.numRows = 3;
- pSrcB.pData = pDataB;
-
- pDst.numCols = 3;
- pDst.numRows = 3;
- pDst.pData = pDataDst;
-
- printf("****浮点数******************************************\r\n");
- arm_mat_mult_f32(&pSrcA, &pSrcB, &pDst);
- for(i = 0; i < 9; i++)
- {
- printf("pDataDst[%d] = %f\r\n", i, pDataDst[i]);
- }
-
- /****定点数Q31***********************************************************************/
- pSrcA1.numCols = 3;
- pSrcA1.numRows = 3;
- pSrcA1.pData = pDataA1;
-
- pSrcB1.numCols = 3;
- pSrcB1.numRows = 3;
- pSrcB1.pData = pDataB1;
-
- pDst1.numCols = 3;
- pDst1.numRows = 3;
- pDst1.pData = pDataDst1;
-
- printf("****定点数Q31******************************************\r\n");
- arm_mat_mult_q31(&pSrcA1, &pSrcB1, &pDst1);
- arm_mat_mult_fast_q31(&pSrcA1, &pSrcB1, &pDst1);
- for(i = 0; i < 9; i++)
- {
- printf("pDataDst1[%d] = %d\r\n", i, pDataDst1[i]);
- }
-
- /****定点数Q15***********************************************************************/
- pSrcA2.numCols = 3;
- pSrcA2.numRows = 3;
- pSrcA2.pData = pDataA2;
-
- pSrcB2.numCols = 3;
- pSrcB2.numRows = 3;
- pSrcB2.pData = pDataB2;
-
- pDst2.numCols = 3;
- pDst2.numRows = 3;
- pDst2.pData = pDataDst2;
-
- printf("****定点数Q15******************************************\r\n");
- arm_mat_mult_q15(&pSrcA2, &pSrcB2, &pDst2, &pState);
- arm_mat_mult_fast_q15(&pSrcA2, &pSrcB2, &pDst2, &pState);
- for(i = 0; i < 9; i++)
- {
- printf("pDataDst2[%d] = %d\r\n", i, pDataDst2[i]);
- }
-
- }
1. 下面通过matlab实现矩阵的乘法:
20.3 转置矩阵 MatTrans
20.3.1 arm_mat_trans_f32
公式描述:
函数定义如下:
arm_statusarm_mat_trans_f32(
const arm_matrix_instance_f32 * pSrc,
arm_matrix_instance_f32 * pDst)
参数定义:
[in] *pSrc points to the input matrix
[out] *pDst pointsto the output matrix
return The function returns either <code>ARM_MATH_SIZE_MISMATCH</code>
注意事项:
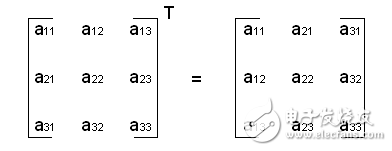
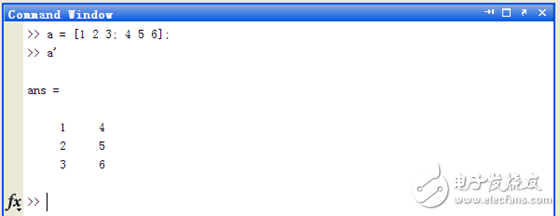
1. 矩阵M x N转置后是N x M。
20.3.2 arm_mat_trans_q31
函数定义如下:
arm_statusarm_mat_trans_q31(
const arm_matrix_instance_q31 * pSrc,
arm_matrix_instance_q31 * pDst)
参数定义:
[in] *pSrc points to the input matrix
[out] *pDst points to the output matrix
return Thefunction returns either <code>ARM_MATH_SIZE_MISMATCH</code>
注意事项:
1. 矩阵M x N转置后是N x M。
20.3.3 arm_mat_trans_q15
函数定义如下:
arm_statusarm_mat_trans_q15(
const arm_matrix_instance_q15 * pSrc,
arm_matrix_instance_q15 * pDst)
参数定义:
[in] *pSrc points to the input matrix
[out] *pDst points to the output matrix
return Thefunction returns either <code>ARM_MATH_SIZE_MISMATCH</code>
注意事项:
1. 矩阵M x N转置后是N x M。
20.3.4 实例讲解
实验目的:
1. 学习MatrixFunctions中的转置矩阵
实验内容:
1. 按下按键K3, 串口打印函数DSP_MatTrans的输出结果
实验现象:
通过窗口上位机软件SecureCRT(V5光盘里面有此软件)查看打印信息现象如下:
程序设计:
- /*
- *********************************************************************************************************
- * 函 数 名: DSP_MatTrans
- * 功能说明: 求逆矩阵
- * 形 参:无
- * 返 回 值: 无
- *********************************************************************************************************
- */
- static void DSP_MatTrans(void)
- {
- uint8_t i;
-
- /****浮点数数组******************************************************************/
- float32_t pDataA[9] = {1.1f, 1.1f, 2.1f, 2.1f, 3.1f, 3.1f, 4.1f, 4.1f, 5.1f};
- float32_t pDataDst[9];
-
- arm_matrix_instance_f32 pSrcA; //3行3列数据
- arm_matrix_instance_f32 pDst;
-
- /****定点数Q31数组******************************************************************/
- q31_t pDataA1[9] = {1, 1, 2, 2, 3, 3, 4, 4, 5};
- q31_t pDataDst1[9];
-
- arm_matrix_instance_q31 pSrcA1; //3行3列数据
- arm_matrix_instance_q31 pDst1;
-
- /****定点数Q15数组******************************************************************/
- q15_t pDataA2[9] = {1, 1, 2, 2, 3, 3, 4, 4, 5};
- q15_t pDataDst2[9];
-
- arm_matrix_instance_q15 pSrcA2; //3行3列数据
- arm_matrix_instance_q15 pDst2;
-
- /****浮点数***********************************************************************/
- pSrcA.numCols = 3;
- pSrcA.numRows = 3;
- pSrcA.pData = pDataA;
-
- pDst.numCols = 3;
- pDst.numRows = 3;
- pDst.pData = pDataDst;
-
- printf("****浮点数******************************************\r\n");
- status = arm_mat_trans_f32(&pSrcA, &pDst);
- for(i = 0; i < 9; i++)
- {
- printf("pDataDst[%d] = %f\r\n", i, pDataDst[i]);
- }
-
- /****定点数Q31***********************************************************************/
- pSrcA1.numCols = 3;
- pSrcA1.numRows = 3;
- pSrcA1.pData = pDataA1;
-
- pDst1.numCols = 3;
- pDst1.numRows = 3;
- pDst1.pData = pDataDst1;
-
- printf("****定点数Q31******************************************\r\n");
- status = arm_mat_trans_q31(&pSrcA1, &pDst1);
- for(i = 0; i < 9; i++)
- {
- printf("pDataDst1[%d] = %d\r\n", i, pDataDst1[i]);
- }
-
- /****定点数Q15***********************************************************************/
- pSrcA2.numCols = 3;
- pSrcA2.numRows = 3;
- pSrcA2.pData = pDataA2;
-
- pDst2.numCols = 3;
- pDst2.numRows = 3;
- pDst2.pData = pDataDst2;
-
- printf("****定点数Q15******************************************\r\n");
- status = arm_mat_trans_q15(&pSrcA2, &pDst2);
- for(i = 0; i < 9; i++)
- {
- printf("pDataDst2[%d] = %d\r\n", i, pDataDst2[i]);
- }
-
- }
1. 下面通过matlab实现矩阵的转置:
20.4 总结
本期教程就跟大家讲这么多,有兴趣的可以深入研究下算法的具体实现。