怎样才能让我的电动机转起来,求大神写程序,拜托了
时间:10-02
整理:3721RD
点击:
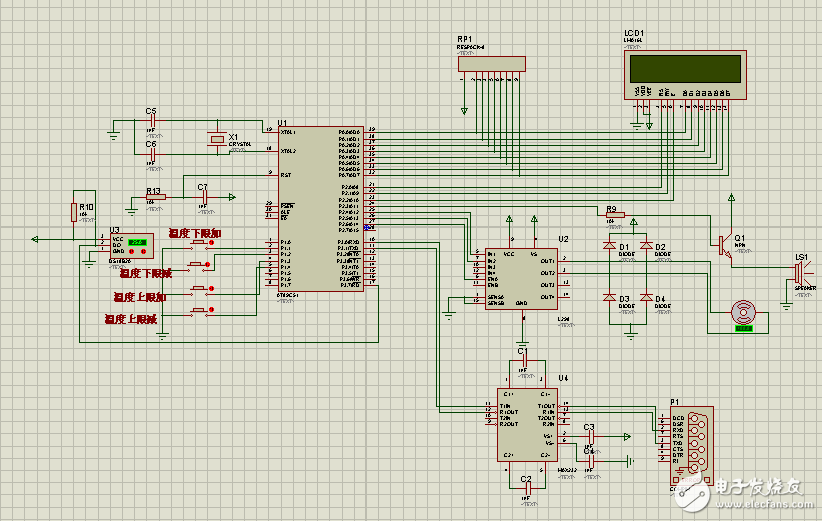
怎样才能让我的电动机转起来,求大神写程序,拜托了,只要电动机这一部分,当温度高于设定的最大值时正转,否则就停止
/*-----------------------------------------------
名称:18B20温度测量报警
内容:在LCD1602第一行可以显示当前温度,
第二行显示设定的温度区间,超过此温度区间,蜂鸣器报警。
温度区间可以通过用户按键设置
------------------------------------------------*/
#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义
#include<math.h>
#include<INTRINS.H>
#define uchar unsigned char
#define uint unsigned int
/******************************************************************/
/* 定义端口 */
/******************************************************************/
sbit buzzer=P2^3;//蜂鸣器引脚
sbit DQ=P3^7;//ds18b20 端口
sbit RS = P2^0;//1602数据/命令选择端(H:数据寄存器L:指令寄存器)
sbit RW = P2^1;//1602读/写选择端
sbit E = P2^2;//1602使能信号端
sbit key1=P1^1;//用户按键
sbit key2=P1^2;
sbit key3=P1^3;
sbit key4=P1^4;
/******************************************************************/
/* 全局变量 */
/******************************************************************/
int temp;//测得温度
char temp_max=30,temp_min=10;//设定的温度
char TempH,TempL;
uchar flag_get,num=0;
uchar code tab[]={'0','1','2','3','4','5','6','7','8','9'};//液晶显示
uchar tab1[]=" TL:010 TH:030";//液晶第二行显示内容
uchar str[8];
/******************************************************************/
/* 延时函数 */
/******************************************************************/
void delay1(uint i)//短延时函数
{
while(i--);
}
void delay(uint z) //长延时函数
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
/******************************************************************/
/* DS18B20 初始化 */
/******************************************************************/
void Init_DS18B20(void)
{
/*uchar x=0;
DQ = 0; //单片机将DQ拉低
delay1(480); //精确延时 大于 480us
DQ = 1; //拉高总线,等待
delay1(10);
x=DQ; //稍做延时后 如果x=0则初始化成功 x=1则初始化失败
delay1(5);*/
unsigned char x=0;
DQ = 1; //DQ复位
delay1(8); //稍做延时
DQ = 0; //单片机将DQ拉低
delay1(80); //精确延时 大于 480us
DQ = 1; //拉高总线
delay1(14);
x=DQ; //稍做延时后 如果x=0则初始化成功 x=1则初始化失败
delay1(20);
}
/******************************************************************/
/* DS18B20读一个字节 */
/******************************************************************/
uchar ReadOneChar(void) // DS18B20读一个字节
{
uchar i=0;
uchar dat = 0;
for (i=8;i>0;i--)
{
DQ = 0; // 给脉冲信号
dat>>=1;
DQ = 1; // 给脉冲信号,主机在读时隙期间必须释放总线
if(DQ)
dat|=0x80;
delay1(5);
}
return(dat);
}
/******************************************************************/
/* DS18B20写一个字节 */
/******************************************************************/
void WriteOneChar(uchar dat) //DS18B20写一个字节
{
uchar i=0;
for (i=8; i>0; i--)
{
DQ = 0;
DQ = dat&0x01;//取最低位
delay1(5);
DQ = 1;
dat>>=1;//左移
}
delay1(5);
}
/******************************************************************/
/* DS18B20读取温度 */
/******************************************************************/
uint ReadTemperature(void) //DS18B20读取温度
{
uchar a=0;
uint b=0;
uint t=0;
Init_DS18B20();//DS18B20初始化
WriteOneChar(0xCC); // 跳过读序号列号的操作
WriteOneChar(0x44); // 启动温度转换
delay1(200); //延时以求信号的稳定
Init_DS18B20(); //DS18B20再次初始化
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0xBE); //读取温度寄存器等(共可读9个寄存器) 前两个就是温度
a=ReadOneChar(); //低位
b=ReadOneChar(); //高位
b<<=8; //b左移8位
t=a+b; //把a与b结合,放在16位的t中
return(t);
}
/******************************************************************/
/* LCD1602写命令操作 */
/******************************************************************/
void WriteCommand(uchar com)
{
delay(5);//操作前短暂延时,保证信号稳定
E=0;
RS=0;
RW=0;
P0=com;
E=1;
delay(5);
E=0;
}
/******************************************************************/
/* LCD1602写数据操作 */
/******************************************************************/
void WriteData(uchar dat)
{
delay(5); //操作前短暂延时,保证信号稳定
E=0;
RS=1;
RW=0;
P0=dat;
E=1;
delay(5);
E=0;
}
/******************************************************************/
/* LCD1602初始化程序 */
/******************************************************************/
void InitLcd()
{
uchar i;
delay(15);
WriteCommand(0x38); //display mode
WriteCommand(0x38); //display mode
WriteCommand(0x38); //display mode
WriteCommand(0x06); //显示光标移动位置
WriteCommand(0x0c); //显示开及光标设置
WriteCommand(0x01); //显示清屏
WriteCommand(0x80+0x40);//将光标移到第二行
for(i=0;i<16;i++)//显示初始化内容
{
WriteData(tab1[i]);
delay(10);
}
}
/******************************************************************/
/* 蜂鸣器报警程序 */
/******************************************************************/
void alarm()
{
if(TempH>=temp_max&&TempH<temp_min)//当温度高于设置的最高温报警或低于设置的最低温报警
{ buzzer=0;
delay(50);
buzzer=1;
delay(50);
}
else//报警解除
{
buzzer=1;
}
}
/******************************************************************/
/* 显示测得的温度 */
/******************************************************************/
void handle_T()
{
uchar i;
str[0]=0x20;//显示为空
str[1]=tab[TempH/100]; //百位温度
str[2]=tab[(TempH%100)/10]; //十位温度
str[3]=tab[(TempH%100)%10]; //个位温度,带小数点
str[5]=tab[TempL];
str[4]='.';
str[6]=0xdf;
str[7]='C';
if(flag_get==1) //定时读取当前温度
{
flag_get=0; //清标志位
temp=ReadTemperature();//读取温度值
if(temp&0x8000)
{
str[0]=0xb0;//负号标志
temp=~temp; // 取反加1
temp +=1;
}
TempH=temp>>4; //由权重表知移4位就是整数位
TempL=temp&0x0F;
TempL=TempL*6/10;//小数近似处理
alarm(); //判断是否需要报警
}
WriteCommand(0x80+0x04);//光标指向第一行第一个字符
for(i=0;i<8;i++)// 显示
{
WriteData(str[i]);
delay(10);
}
}
void display_range(uchar add,int t)
{
uchar i;
if(t<0)
{
str[0]=0xb0;//负号标志
}
else
str[0]=tab[abs(t)/100]; //百位温度
str[1]=tab[(abs(t)%100)/10]; //十位温度
str[2]=tab[(abs(t)%100)%10]; //个位温度
WriteCommand(0x80+0x40+add);
for(i=0;i<3;i++)
{
WriteData(str[i]);
delay(5);
}
}
/******************************************************************/
/* 独立键盘扫描函数并显示设定的温度 */
/******************************************************************/
void keyscan()
{
uchar flag1=0,flag2=0;//有按键按下标记
P1=0xff;//拉高P2口,以读取P2口的值
if(key3==0)//最高温加
{
delay(5);//延时消抖
if(key3==0)
{
temp_max++;
if(temp_max>=85)
temp_max=85;
}
while(!key3);//松手检测
flag1=1;
}
if(key4==0)//最高温减
{
delay(5);
if(key4==0)
{
temp_max--;
if(temp_max<=temp_min)
temp_max=temp_min;
}
while(!key4);
flag1=1;
}
if(key1==0)//最低温加
{
delay(5);//延时消抖
if(key1==0)
{
temp_min++;
if(temp_min>=temp_max)
temp_min=temp_max;
}
while(!key1);//松手检测
flag2=1;
}
if(key2==0)//最低温减
{
delay(5);
if(key2==0)
{
temp_min--;
if(temp_min<=-10)
temp_min=-10;
}
while(!key2);
flag2=1;
}
if(flag1)//如有设置最高温度的键按下,更新设定的温度
{
flag1=0;// 清标记
display_range(0x0d,temp_max);
}
if(flag2)//如有设置最低温度的键按下,更新设定的温度
{
flag2=0;// 清标记
display_range(0x04,temp_min);
}
}
/****************************************************************/
/* 主函数 */
/******************************************************************/
void main()
{
TMOD|=0x01;//定时器设置
TH0=0xef;//装初始值
TL0=0xf0;
EA=1;// 开总中断
ET0=1;//允许定时器0中断
TR0=1;//开定时器0中断
InitLcd();//lcd1602初始化
flag_get=1;
while(1)
{
handle_T();// 处理温度:获得、显示、报警
keyscan(); //独立按键扫描
}
}
/******************************************************************/
/* 定时0中断处理程序,用于温度检测间隔,大约1秒测一次温度 */
/******************************************************************/
void timer0(void) interrupt 1 using 1
{
TH0=0xef;//定时器重装值
TL0=0xf0;
num++;
if (num==50)
{
num=0;
flag_get=1;//标志位有效,开始测温
}
}

/*-----------------------------------------------
名称:18B20温度测量报警
内容:在LCD1602第一行可以显示当前温度,
第二行显示设定的温度区间,超过此温度区间,蜂鸣器报警。
温度区间可以通过用户按键设置
------------------------------------------------*/
#include<reg52.h> //包含头文件,一般情况不需要改动,头文件包含特殊功能寄存器的定义
#include<math.h>
#include<INTRINS.H>
#define uchar unsigned char
#define uint unsigned int
/******************************************************************/
/* 定义端口 */
/******************************************************************/
sbit buzzer=P2^3;//蜂鸣器引脚
sbit DQ=P3^7;//ds18b20 端口
sbit RS = P2^0;//1602数据/命令选择端(H:数据寄存器L:指令寄存器)
sbit RW = P2^1;//1602读/写选择端
sbit E = P2^2;//1602使能信号端
sbit key1=P1^1;//用户按键
sbit key2=P1^2;
sbit key3=P1^3;
sbit key4=P1^4;
/******************************************************************/
/* 全局变量 */
/******************************************************************/
int temp;//测得温度
char temp_max=30,temp_min=10;//设定的温度
char TempH,TempL;
uchar flag_get,num=0;
uchar code tab[]={'0','1','2','3','4','5','6','7','8','9'};//液晶显示
uchar tab1[]=" TL:010 TH:030";//液晶第二行显示内容
uchar str[8];
/******************************************************************/
/* 延时函数 */
/******************************************************************/
void delay1(uint i)//短延时函数
{
while(i--);
}
void delay(uint z) //长延时函数
{
uint x,y;
for(x=z;x>0;x--)
for(y=110;y>0;y--);
}
/******************************************************************/
/* DS18B20 初始化 */
/******************************************************************/
void Init_DS18B20(void)
{
/*uchar x=0;
DQ = 0; //单片机将DQ拉低
delay1(480); //精确延时 大于 480us
DQ = 1; //拉高总线,等待
delay1(10);
x=DQ; //稍做延时后 如果x=0则初始化成功 x=1则初始化失败
delay1(5);*/
unsigned char x=0;
DQ = 1; //DQ复位
delay1(8); //稍做延时
DQ = 0; //单片机将DQ拉低
delay1(80); //精确延时 大于 480us
DQ = 1; //拉高总线
delay1(14);
x=DQ; //稍做延时后 如果x=0则初始化成功 x=1则初始化失败
delay1(20);
}
/******************************************************************/
/* DS18B20读一个字节 */
/******************************************************************/
uchar ReadOneChar(void) // DS18B20读一个字节
{
uchar i=0;
uchar dat = 0;
for (i=8;i>0;i--)
{
DQ = 0; // 给脉冲信号
dat>>=1;
DQ = 1; // 给脉冲信号,主机在读时隙期间必须释放总线
if(DQ)
dat|=0x80;
delay1(5);
}
return(dat);
}
/******************************************************************/
/* DS18B20写一个字节 */
/******************************************************************/
void WriteOneChar(uchar dat) //DS18B20写一个字节
{
uchar i=0;
for (i=8; i>0; i--)
{
DQ = 0;
DQ = dat&0x01;//取最低位
delay1(5);
DQ = 1;
dat>>=1;//左移
}
delay1(5);
}
/******************************************************************/
/* DS18B20读取温度 */
/******************************************************************/
uint ReadTemperature(void) //DS18B20读取温度
{
uchar a=0;
uint b=0;
uint t=0;
Init_DS18B20();//DS18B20初始化
WriteOneChar(0xCC); // 跳过读序号列号的操作
WriteOneChar(0x44); // 启动温度转换
delay1(200); //延时以求信号的稳定
Init_DS18B20(); //DS18B20再次初始化
WriteOneChar(0xCC); //跳过读序号列号的操作
WriteOneChar(0xBE); //读取温度寄存器等(共可读9个寄存器) 前两个就是温度
a=ReadOneChar(); //低位
b=ReadOneChar(); //高位
b<<=8; //b左移8位
t=a+b; //把a与b结合,放在16位的t中
return(t);
}
/******************************************************************/
/* LCD1602写命令操作 */
/******************************************************************/
void WriteCommand(uchar com)
{
delay(5);//操作前短暂延时,保证信号稳定
E=0;
RS=0;
RW=0;
P0=com;
E=1;
delay(5);
E=0;
}
/******************************************************************/
/* LCD1602写数据操作 */
/******************************************************************/
void WriteData(uchar dat)
{
delay(5); //操作前短暂延时,保证信号稳定
E=0;
RS=1;
RW=0;
P0=dat;
E=1;
delay(5);
E=0;
}
/******************************************************************/
/* LCD1602初始化程序 */
/******************************************************************/
void InitLcd()
{
uchar i;
delay(15);
WriteCommand(0x38); //display mode
WriteCommand(0x38); //display mode
WriteCommand(0x38); //display mode
WriteCommand(0x06); //显示光标移动位置
WriteCommand(0x0c); //显示开及光标设置
WriteCommand(0x01); //显示清屏
WriteCommand(0x80+0x40);//将光标移到第二行
for(i=0;i<16;i++)//显示初始化内容
{
WriteData(tab1[i]);
delay(10);
}
}
/******************************************************************/
/* 蜂鸣器报警程序 */
/******************************************************************/
void alarm()
{
if(TempH>=temp_max&&TempH<temp_min)//当温度高于设置的最高温报警或低于设置的最低温报警
{ buzzer=0;
delay(50);
buzzer=1;
delay(50);
}
else//报警解除
{
buzzer=1;
}
}
/******************************************************************/
/* 显示测得的温度 */
/******************************************************************/
void handle_T()
{
uchar i;
str[0]=0x20;//显示为空
str[1]=tab[TempH/100]; //百位温度
str[2]=tab[(TempH%100)/10]; //十位温度
str[3]=tab[(TempH%100)%10]; //个位温度,带小数点
str[5]=tab[TempL];
str[4]='.';
str[6]=0xdf;
str[7]='C';
if(flag_get==1) //定时读取当前温度
{
flag_get=0; //清标志位
temp=ReadTemperature();//读取温度值
if(temp&0x8000)
{
str[0]=0xb0;//负号标志
temp=~temp; // 取反加1
temp +=1;
}
TempH=temp>>4; //由权重表知移4位就是整数位
TempL=temp&0x0F;
TempL=TempL*6/10;//小数近似处理
alarm(); //判断是否需要报警
}
WriteCommand(0x80+0x04);//光标指向第一行第一个字符
for(i=0;i<8;i++)// 显示
{
WriteData(str[i]);
delay(10);
}
}
void display_range(uchar add,int t)
{
uchar i;
if(t<0)
{
str[0]=0xb0;//负号标志
}
else
str[0]=tab[abs(t)/100]; //百位温度
str[1]=tab[(abs(t)%100)/10]; //十位温度
str[2]=tab[(abs(t)%100)%10]; //个位温度
WriteCommand(0x80+0x40+add);
for(i=0;i<3;i++)
{
WriteData(str[i]);
delay(5);
}
}
/******************************************************************/
/* 独立键盘扫描函数并显示设定的温度 */
/******************************************************************/
void keyscan()
{
uchar flag1=0,flag2=0;//有按键按下标记
P1=0xff;//拉高P2口,以读取P2口的值
if(key3==0)//最高温加
{
delay(5);//延时消抖
if(key3==0)
{
temp_max++;
if(temp_max>=85)
temp_max=85;
}
while(!key3);//松手检测
flag1=1;
}
if(key4==0)//最高温减
{
delay(5);
if(key4==0)
{
temp_max--;
if(temp_max<=temp_min)
temp_max=temp_min;
}
while(!key4);
flag1=1;
}
if(key1==0)//最低温加
{
delay(5);//延时消抖
if(key1==0)
{
temp_min++;
if(temp_min>=temp_max)
temp_min=temp_max;
}
while(!key1);//松手检测
flag2=1;
}
if(key2==0)//最低温减
{
delay(5);
if(key2==0)
{
temp_min--;
if(temp_min<=-10)
temp_min=-10;
}
while(!key2);
flag2=1;
}
if(flag1)//如有设置最高温度的键按下,更新设定的温度
{
flag1=0;// 清标记
display_range(0x0d,temp_max);
}
if(flag2)//如有设置最低温度的键按下,更新设定的温度
{
flag2=0;// 清标记
display_range(0x04,temp_min);
}
}
/****************************************************************/
/* 主函数 */
/******************************************************************/
void main()
{
TMOD|=0x01;//定时器设置
TH0=0xef;//装初始值
TL0=0xf0;
EA=1;// 开总中断
ET0=1;//允许定时器0中断
TR0=1;//开定时器0中断
InitLcd();//lcd1602初始化
flag_get=1;
while(1)
{
handle_T();// 处理温度:获得、显示、报警
keyscan(); //独立按键扫描
}
}
/******************************************************************/
/* 定时0中断处理程序,用于温度检测间隔,大约1秒测一次温度 */
/******************************************************************/
void timer0(void) interrupt 1 using 1
{
TH0=0xef;//定时器重装值
TL0=0xf0;
num++;
if (num==50)
{
num=0;
flag_get=1;//标志位有效,开始测温
}
}
待我慢慢研究
void moto()
{
if(TempH>=temp_max)//当温度高于设置的最高温时电机正转
{
P3=0x0d;
}
else
{
P3=0x00;
}
}
不出错应该就是这样
楼上讲得好!