遥控坦克DIY,解密13,坦克的调试
时间:10-02
整理:3721RD
点击:
有段时间没有来解密了,今天继续......
经过前面12次“解密”,相信大家对遥控坦克的原理以及基本结构有了一定认识,如果要让我们的坦克跑起来还要经历一个调试阶段,其实调试的主要目的就让坦克根据我们的操作产生正确的行为。比如我们按前坦克就向前走,我们按做坦克就向左转等等。
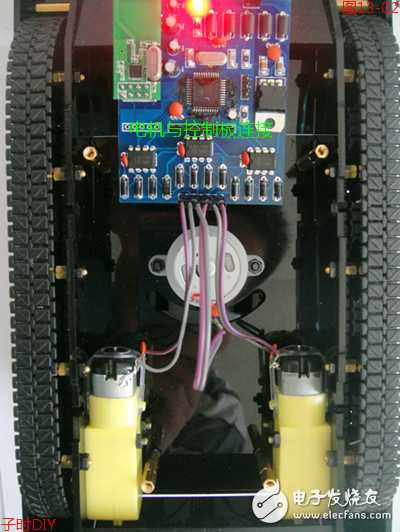
首先我们要将坦克的3个电机与控制板进行连接,如图13-01:

大家可以看到控制板上有6根(3组)插针,中间一组控制炮塔,两边2组控制坦克履带,首先我们把炮塔电机插到中间的一组插针上,然后把履带电机插到两侧的插针上如图13-02:
电机与控制连接后我们开始调试工作,调试主要就是观察电机的旋转方向是否正确,以上面的图为例,我们描述调试过程:
1. 按动遥控器上的“上键”,如果两条履带向下滚动,我们进入步骤3,否则进入步骤2;
2. 将旋转方向错误的电机的插针交换位置(组内交换),使其旋转方向正确,进入步骤3;
3. 按动遥控器上的“左键”,如果左侧履带向下滚动,右侧履带向上滚动,调试结束,否则将左右两个电机接入插针的位置进行交换(组间交换),然后回到步骤1;
上面的过程看起来可能有点不清晰,我们还是画张图,来清晰说明组内交换和组间交换的概念,如图13-03:

直到第三步的条件得到满足,坦克的调试工作结束,对于炮塔动作的调试比较简单,只涉及到组内交换只要方向反了把插针交换一下就可以了,这里不进行介绍了。坦克调试结束后我们就可以遥控他自由驰骋喽。
最后我们展示一下手柄图片,目前手柄按键是针对遥控坦克进行开发的,上面有7个按键,我们暂时使用其中的6个,如图13-04:

关于手柄的更多实现细节我们会单独做一次讲解,今天就到这里喽。
经过前面12次“解密”,相信大家对遥控坦克的原理以及基本结构有了一定认识,如果要让我们的坦克跑起来还要经历一个调试阶段,其实调试的主要目的就让坦克根据我们的操作产生正确的行为。比如我们按前坦克就向前走,我们按做坦克就向左转等等。
首先我们要将坦克的3个电机与控制板进行连接,如图13-01:
大家可以看到控制板上有6根(3组)插针,中间一组控制炮塔,两边2组控制坦克履带,首先我们把炮塔电机插到中间的一组插针上,然后把履带电机插到两侧的插针上如图13-02:
电机与控制连接后我们开始调试工作,调试主要就是观察电机的旋转方向是否正确,以上面的图为例,我们描述调试过程:
1. 按动遥控器上的“上键”,如果两条履带向下滚动,我们进入步骤3,否则进入步骤2;
2. 将旋转方向错误的电机的插针交换位置(组内交换),使其旋转方向正确,进入步骤3;
3. 按动遥控器上的“左键”,如果左侧履带向下滚动,右侧履带向上滚动,调试结束,否则将左右两个电机接入插针的位置进行交换(组间交换),然后回到步骤1;
上面的过程看起来可能有点不清晰,我们还是画张图,来清晰说明组内交换和组间交换的概念,如图13-03:
直到第三步的条件得到满足,坦克的调试工作结束,对于炮塔动作的调试比较简单,只涉及到组内交换只要方向反了把插针交换一下就可以了,这里不进行介绍了。坦克调试结束后我们就可以遥控他自由驰骋喽。
最后我们展示一下手柄图片,目前手柄按键是针对遥控坦克进行开发的,上面有7个按键,我们暂时使用其中的6个,如图13-04:
关于手柄的更多实现细节我们会单独做一次讲解,今天就到这里喽。
前10次解密:http://bbs.elecfans.com/jishu_304839_1_1.html
第11、12次解密:http://bbs.elecfans.com/jishu_309088_1_1.html
大家多多交流

多多分享,多多交流
欢迎提出意见
谢谢
感谢关注,正在升级改进......
小编好厉害
多谢分享
多多分享,多多交流
小编是怎么通过遥控的呢,希望交流一下 ,我想做个坦克模型来着
好久没来了......
坦克师通过nrf24l01这个无线模块进行遥控的,
可以参考相关帖子http://bbs.elecfans.com/jishu_320727_1_1.html