循迹小车制作详解
车体设计
方案1:购买玩具电动车。购买的玩具电动车具有组装完整的车架车轮、电机及其驱动电路。但是一般的说来,玩具电动车具有如下缺点:首先,这种玩具电动车由于装配紧凑,使得各种所需传感器的安装十分不方便。其次,这种电动车一般都是前轮转向后轮驱动,不能适应该题目的方格地图,不能方便迅速的实现原地保持坐标转90度甚至180度的弯角。再次,玩具电动车的电机多为玩具直流电机,力矩小,空载转速快,负载性能差,不易调速。而且这种电动车一般都价格不菲。因此我们放弃了此方案。
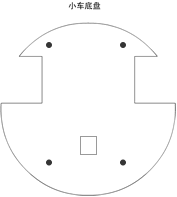
方案2:自己制作电动车。经过反复考虑论证,我们制定了左右两轮分别驱动,后万向轮转向的方案。即左右轮分别用两个转速和力矩基本完全相同的直流电机进行驱动,车体尾部装一个万向轮。这样,当两个直流电机转向相反同时转速相同时就可以实现电动车的原地旋转,由此可以轻松的实现小车坐标不变的90度和180度的转弯。
在安装时我们保证两个驱动电机同轴。当小车前进时,左右两驱动轮与后万向轮形成了三点结构。这种结构使得小车在前进时比较平稳,可以避免出现后轮过低而使左右两驱动轮驱动力不够的情况。为了防止小车重心的偏移,后万向轮起支撑作用。
对于车架材料的选择,我们经过比较选择了有机玻璃。用有机玻璃做的车架比塑料车架更加牢固,比铁制小车更轻便,美观。
综上考虑,我们选择了方案2。小车底盘如图1所示:
file:///C:/Users/HXY/AppData/Local/Temp/ksohtml/wps_clip_image-3533.png
轮子方案:
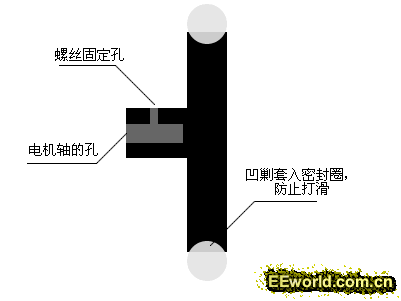
在选定电机后,我们买了一个万向轮,万向轮的高度减去电机的半径就是驱动轮的半径。
轮子是在工程训练中心用尼龙棒在车床上作出来的,当时我们还戏称我们的小车是“机电一体化”的产品。
轮子的截面图:
file:///C:/Users/HXY/AppData/Local/Temp/ksohtml/wps_clip_image-26823.png
万向轮:
当小车前进时,左右两驱动轮与后万向轮形成了三点结构。这种结构使得小车在前进时比较平稳,可以避免出现后轮过低而使左右两驱动轮驱动力不够的情况。为了防止小车重心的偏移,后万向轮起支撑作用。并且可以轻松实现90度甚至180度原地转弯。
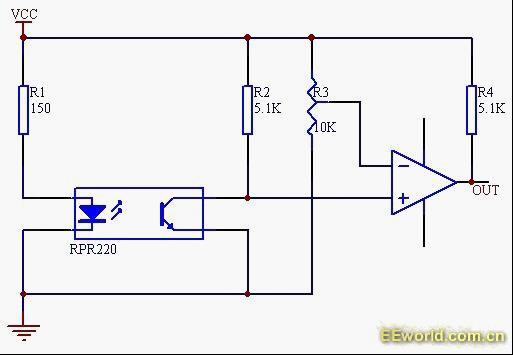
电压比较器电路(光电对管检测电路):
可调电阻R3可以调节比较器的门限电压,经示波器观察,输出波形相当规则,可以直接够单片机查询使用。 而且经试验验证给此电路供电的电池的压降较小。因此我们选择此电路作为我们的传感器检测与调理电路。
file:///C:/Users/HXY/AppData/Local/Temp/ksohtml/wps_clip_image-3334.pngfile:///C:/Users/HXY/AppData/Local/Temp/ksohtml/wps_clip_image-28533.png
电源电路:
由于本系统需要电池供电,我们考虑了如下几种方案为系统供电。
方案1: 采用10节1.5V干电池供电,电压达到15V,经7812稳压后给支流电机供电,然后将12V电压再次降压、稳压后给单片机系统和其他芯片供电。但干电池电量有限,使用大量的干电池给系统调试带来很大的不便,因此,我们放弃了这种方案。
方案2:采用3节4.2V可充电式锂电池串联共12.6V给直流电机供电,经过7812的电压变换后给支流电机供电,然后将12V电压再次降压、稳压后给单片机系统和其他芯片供电。锂电池的电量比较足,并且可以充电,重复利用,因此,这种方案比较可行。但锂电池的价格过于昂贵,使用锂电池会大大超出我们的预算,因此,我们放弃了这种方案。
方案3:采用12V蓄电池为直流电机供电,将12V电压降压、稳压后给单片机系统和其他芯片供电。蓄电池具有较强的电流驱动能力以及稳定的电压输出性能。虽然蓄电池的体积过于庞大,在小型电动车上使用极为不方便,但由于我们的车体设计时留出了足够的空间,并且蓄电池的价格比较低。
稳压模块:
方案1: 采用两片7812将电压稳压至12V后给直流电机供电,然后采用一片7809将电压稳定至9V,最后经7805将电压稳至5V,给单片机系统和其他芯片供电,但7809和7805压降过大,使7809和7805消耗的功率过大,导致7809和7805发热量过大,因此,我们放弃了这种方案。
方案2:采用两片7812将电压稳压至12V后给直流电机供电,然后采用2576将电压稳至5V。2576的输出电流最大可至3A,完全满足系统要求。
综上考虑,我们选择了方案2。
循迹传感器模块
方案1:用光敏电阻组成光敏探测器。光敏电阻的阻值可以跟随周围环境光线的变化而变化。当光线照射到白线上面时,光线发射强烈,光线照射到黑线上面时,光线发射较弱。因此光敏电阻在白线和黑线上方时,阻值会发生明显的变化。将阻值的变化值经过比较器就可以输出高低电平。
但是这种方案受光照影响很大,不能够稳定的工作。因此我们考虑其他更加稳定的方案。
方案2:用红外发射管和接收管自己制作光电对管寻迹传感器。红外发射管发出红外线,当发出的红外线照射到白色的平面后反射,若红外接收管能接收到反射回的光线则检测出白线继而输出低电平,若接收不到发射管发出的光线则检测出黑线继而输出高电平。这样自己制作组装的寻迹传感器基本能够满足要求,但是工作不够稳定,且容易受外界光线的影响,因此我们放弃了这个方案。
方案3:用RPR220型光电对管。RPR220是一种一体化反射型光电探测器,其发射器是一个砷化镓红外发光二极管,而接收器是一个高灵敏度,硅平面光电三极管。
RPR220采用DIP4封装,其具有如下特点:
· 塑料透镜可以提高灵敏度。
· 内置可见光过滤器能减小离散光的影响。
· 体积小,结构紧凑。
· 当发光二极管发出的光反射回来时,三极管导通输出低电平。此光电对管调理电路简单,工作性能稳定。
谢谢分享
能否把我的帖子顶到前面一点啊?
图挂了
图没传上
图在附件里面~
图在附件里面~
顶一下,呵呵
小编谢谢啊。
我是新手 来学习的!
这个做过了,不过小编写的很好哈
谢谢小编
谢谢分享。
kan kan
新手,来看下
看看
没看见附近
杠杠滴
不错