基于DRV8255的简易步进驱动器设计
步进电机驱动器是一种将电脉冲转化为角位移的执行机构。当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速和定位的目的。
就以下几方面内容作简单介绍:
◆步进电机及主要参数介绍;
◆步进电机的细分及作用;
◆步进电机 驱动步骤;
◆基于DRV8255的步进电机驱动器设计;
一、 步进电机及主要参数介绍
===================================================================
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、
停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,
它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行
的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电
机转动的速度和加速度,从而达到调速的目的。步进电机主要参数如下:
相数: 步进电机的相数就是指线圈的组数。分别有二相,三相,四相,五相。通常情况,相数高,步距角小,
精度高。
额定电流:电机正常运转时的电流大小。
步距角: 它表示控制系统每发一个步进脉冲信号,电机所转动的角度。该参数反映了步进电机的实际精度。
保持转矩: 是指步进电机通电但没有转动时,定子锁住转子的力矩。
制动转矩:是指步进电机没有通电的情况下,定子锁住转子的力矩。
最高温度: 步进电机温度过高首先会使电机的磁性材料退磁,从而导致力矩下降乃至于失 步,因此电机外
表允许的最高温度应取决于不同电机磁性材料的退磁点;一般来讲,磁性材料的退磁点都在摄氏130度以上,
有的甚至高达摄氏200度以上,所以步进电机外表温度在摄氏80-90度完全正常。
二、 步进电机的细分及作用
===================================================================
2.1细分的介绍:
步进电机的细分控制是由驱动器精确控制步进电机的相电流来实现的,以二相电机为例,假如电机的额定相电流为3A,如果使用常规驱动器(如常用的恒流斩波方式)驱动该电机,电机每运行一步,其绕组内的 电流将从0突变为3A或从3A突变到0,相电流的巨大变化,必然会引起电机运行的振动和噪音。如果使用细分驱动器,在10细分的状态下驱动该电机,电机每运行一微步,其绕组内的电流变化只有0.3A而不是3A,且电流是以正弦曲线规律变化,这样就大大的改善了电机的振动和噪音,因此,在性能上的优点才是细分的真正优点。2.2细分的作用:
◆细分让电机运转更加平滑。
◆力矩增加了。
◆解决了电机工作再低频时的噪音问题。步进电机在低频工作时,会有振动大、噪声大的缺点。如果使用细分方式,就能很好的解决这个问题,步进电机的细分控制,从本质上讲是通过对步进电机励磁绕组中电流的控制,使步进电机内部的合成磁场为均匀的圆形旋转磁场,从而实现步进电机步距角的细分。
三、 步进电机 驱动步骤
===================================================================
步进电机要启动必须在一个固定启动频率范围内,启动以后可以通过提高驱动脉冲的频率来提速,频率要缓慢提升,电机在加速的时候惯性阻力会比较大。步进电机主动时的负载分为两种:惯性负载、摩擦负载,电机在加速的过程中主要是惯性负载,转速稳定后主要是摩擦负载。
四、基于DRV8255的步进电机驱动器设计
1. DRV8825芯片介绍
DRV8825可以驱动一个两项四线的步进电机,也可以驱动两个直流有刷电机,输入电 压8-45V, 最大电流1.7A,可以承受2.5A的瞬间电压。通过PWM输入来驱动。可以通过AVREF/BVREF来调节电机绕阻上的电流,电流的大小应该是电机额定电流;可以通过MODE0/MODE1/MODE2,三个角来配置细分驱动模式,可以配置2/4/8/16/32细分。nHOME脚,从上电开始电机转过45°的位置是home state.电机转到home state时nHOME脚会输出一个低电平。
2、外壳的选型
DRV8255驱动芯片体积小,加上电源,光耦隔离等PCB尺寸也不大,所以选个42驱动器外壳即可。便宜的外壳只有10元左右,如下图所示:

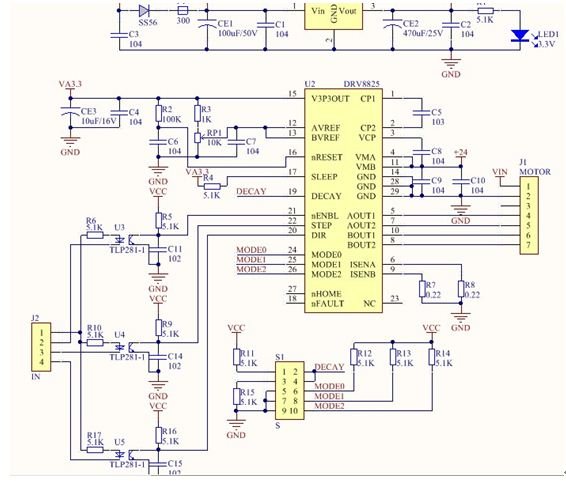
3、原理图设计
仅供参考,如果对成本有要求,电源部分可以换成LM317(有65V版本的),需要抗干扰的话,光耦隔离后可以加一级74HC14,光耦的输入也可以作些处理,比如反向并二极管,加电阻电容啥的(可参考PLC的内部电路),原理图如下图所示:
4、PCB设计
布板时要注意散热的处理,电源(LDO,DC-DC)要离驱动芯片尽可能的远些,周边走线不要紧绕驱动芯片,留出一定的空间,走线对散热有影响。驱动芯片的第0脚是一个散热片,最好焊道板子上,并打过孔到板子反面散热。PCB图见下方:
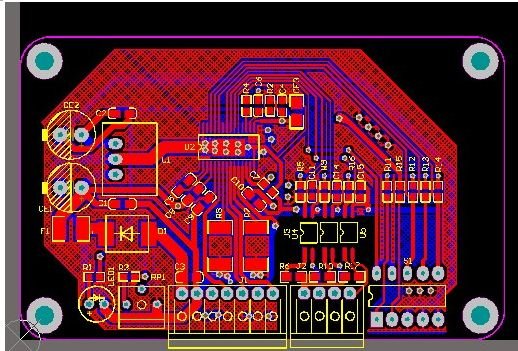
BOTTOM层:



散热处理:参考TI的PCB热设计,我的过孔尺寸选择太大,不合适;
以上纯属个人看法,若大家有问题,请帮忙及时更正,欢迎发表您的见解。
不求高深,只求共同进步,O(∩_∩)O。
如果要做好热处理芯片下面的铜别阻断,应该让它扩散出来想,底层的铜皮也是一样
恩,谢谢指点;
谢谢分享
回楼上,不客气;