以超声波为两侧传感器的履带车应如何控制
时间:10-02
整理:3721RD
点击:
履带车的两侧各有一个超声波,实现履带车可以在矿洞里沿中心行走,原理是超声波采集两侧距墙面距离,对距离差值做模糊处理,进行PID控制来控制两个电机做差速运动。现在的问题是因超声波有角度限制,当履带车从一侧向中心行走时不可避免地要偏转,这时超声波就有可能接收不到返回的信号而被置为最大值4m(这是我程序设置),此时再用差值控制就会发生错误,请问各位有什么思路或想法?
用步进电机带超声波传感器做扫描运动,激光测距就是扫描的。
你这样很难保持与保持超声波与墙壁垂直。用一个舵机和超声波组合起来不断扫描好像雷达一样。可以测得各点以小车的距离以及角度,再进行处理。
你这样很难保持超声波与墙面垂直。用一个舵机与超声波组合不断扫描,好像雷达一样。可以测得各点与小车的距离以及角度,再进行处理。一个超声波就行了。
其实小编可以测得车距里两个墙面的距离,做检测和中心偏转处理就行。当药偏转时,就采用步进方式偏转,防止大角度转向。
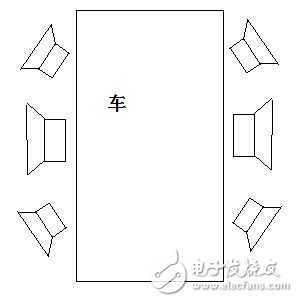
一边三个(或者更多)超声波传感器,按圆周分布
大致如下图形式分布,程序就综合每一边几个超声波的数据