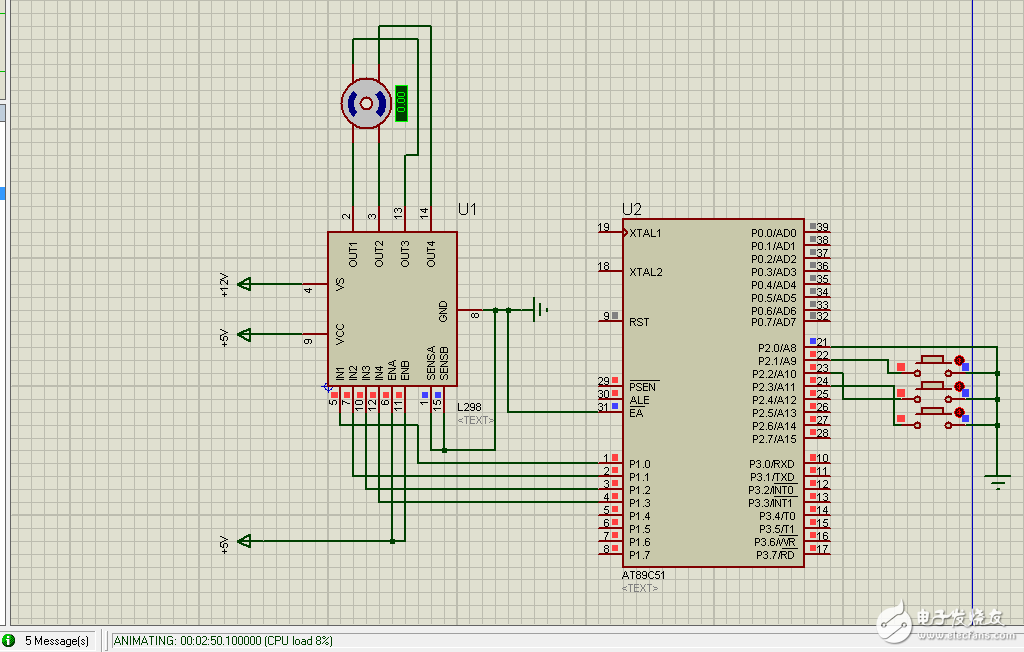
为什么PROTEUS里51嵌入keil编写的程序后没反应?
时间:10-02
整理:3721RD
点击:
#include<reg52.h>
/*------宏定义------*/
#define uchar unsigned char
#define uint unsigned int
/*****P1.0=A ;P1.1=B ;P1.2=A' ; P1.3=B'****/
//////////////////////////////////////////////////////////////////////////////////////////////
/*******************************正转数组**************************************************/
code unsigned char runz[8]={0x05,0x01,0x09,0x08,0x0a,0x02,0x06,0x04}; //两相四线八拍工作方式
/*******************************反转数组**************************************************/
code unsigned char runf[8]={0x04,0x06,0x02,0x0a,0x08,0x09,0x01,0x05}; //两相四线八拍工作方式
uchar keycan=0; //键值
int y=15;//定义转动速度,数值越大电机转速越慢反之则快
sbit P1_0=P1^0;//正转按键
sbit P1_1=P1^1;//反转按键
sbit P1_2=P1^2;//电机减速
sbit P1_3=P1^3;//电机加速
/********************************************************************
延时函数
*********************************************************************/
void delay(i)//延时函数
{
uchar j,k;
for(j=0;j<i;j++)
for(k=0;k<250;k++);
}
/********************************************************************
正转运行函数
*********************************************************************/
void zrun()// 正转运行
{
uchar z;
for(z=0;z<8;z++)
{
P1=runz[z];
delay(y);
}
}
/********************************************************************
反转运行函数
*********************************************************************/
void frun()// 反转运行
{
uchar z;
for(z=0;z<8;z++)
{
P1=runf[z];
delay(y);
}
}
/********************************************************************
主函数
*********************************************************************/
main()
{
while(1)
{
if(P1_0==0) //如果电机正转按键按下
{
keycan=1; //键值等于1
}
if(P1_1==0) //如果电机反转按键按下
{
keycan=2; //键值等于2
}
switch (keycan)
{
case 1: zrun(); //键值等于1 正转
break;
case 2: frun(); //键值等于2 反转
break;
}
if(P1_2==0) // 电机减速
{
y+=2;
}
if(P1_3==0) // 电机加速
{
y-=2;
}
}
}
================================================================================
/*------宏定义------*/
#define uchar unsigned char
#define uint unsigned int
/*****P1.0=A ;P1.1=B ;P1.2=A' ; P1.3=B'****/
//////////////////////////////////////////////////////////////////////////////////////////////
/*******************************正转数组**************************************************/
code unsigned char runz[8]={0x05,0x01,0x09,0x08,0x0a,0x02,0x06,0x04}; //两相四线八拍工作方式
/*******************************反转数组**************************************************/
code unsigned char runf[8]={0x04,0x06,0x02,0x0a,0x08,0x09,0x01,0x05}; //两相四线八拍工作方式
uchar keycan=0; //键值
int y=15;//定义转动速度,数值越大电机转速越慢反之则快
sbit P1_0=P1^0;//正转按键
sbit P1_1=P1^1;//反转按键
sbit P1_2=P1^2;//电机减速
sbit P1_3=P1^3;//电机加速
/********************************************************************
延时函数
*********************************************************************/
void delay(i)//延时函数
{
uchar j,k;
for(j=0;j<i;j++)
for(k=0;k<250;k++);
}
/********************************************************************
正转运行函数
*********************************************************************/
void zrun()// 正转运行
{
uchar z;
for(z=0;z<8;z++)
{
P1=runz[z];
delay(y);
}
}
/********************************************************************
反转运行函数
*********************************************************************/
void frun()// 反转运行
{
uchar z;
for(z=0;z<8;z++)
{
P1=runf[z];
delay(y);
}
}
/********************************************************************
主函数
*********************************************************************/
main()
{
while(1)
{
if(P1_0==0) //如果电机正转按键按下
{
keycan=1; //键值等于1
}
if(P1_1==0) //如果电机反转按键按下
{
keycan=2; //键值等于2
}
switch (keycan)
{
case 1: zrun(); //键值等于1 正转
break;
case 2: frun(); //键值等于2 反转
break;
}
if(P1_2==0) // 电机减速
{
y+=2;
}
if(P1_3==0) // 电机加速
{
y-=2;
}
}
}
================================================================================

看运行结果,至少连P1.0都没有跟随P2.0变化。步进电机更没有反应了。
我对单片机新接触,还不是很清楚,望高手们告诉我应该怎么改?
我运行后,发现没warning啊。程序应该没错吧。小编再试试吧。