在SimpleBLEMulti工程中看门狗初始化问题
参考网上代码在SimpleBLEMulti工程中对看门狗进行如下初始化操作后:
Watchdog_Handle watchdog;
void wdtCallback(UArg handle)
{
Watchdog_clear((Watchdog_Handle)handle);
}
void wdtInitFxn(void)
{
Watchdog_Params wp;
//Watchdog_Handle watchdog;
Watchdog_Params_init(&wp);
wp.callbackFxn = wdtCallback;
wp.debugStallMode = Watchdog_DEBUG_STALL_ON;
wp.resetMode = Watchdog_RESET_ON;
watchdog = Watchdog_open(Board_WATCHDOG, &wp);
Watchdog_setReload(watchdog, 1500000); // 1sec (WDT runs always at 48MHz/32)
}
在一个Util_constructClock线程中添加一个不喂狗的while循环:
while(1)
{
uDelay(30000000);//10000表示1ms
SimpleProfile_SetParameter(SIMPLEPROFILE_CHAR6, 3, "zls");
}
但是看门狗并不会重启,多谢帮忙分析一下原因。请教有没有在串口透传代码中添加看门狗功能的demo提供学习一下。
你好,
之前有用到过watchdog,有几篇文章你可以参考一下
http://blog.csdn.net/gyb510/article/details/50778654
http://blog.csdn.net/zzfenglin/article/details/52253536
测试环境
协议栈版本:BLE-STACK V2.1
IAR开发环境版本:IAR for Arm 7.40
硬件设备:Amo-SmartRF v2.0 开发板(对应TI官方的SmartRF06EB 开发板)
示例测试Demo工程:simpleBLEPeripheral工程
系统驱动层RTOS配置
1.打开“C:\ti\tirtos_simplelink_2_13_00_06\packages\ti\boards\SRF06EB\CC2650EM_7ID”目录下的“Board.c”文件,在文件的最后添加如下代码:
[cpp] view plain copy
![]()
![]()
- /*
- * ============================= WatchDog Begin===========================
- */
- #include <ti/drivers/Watchdog.h>
- #include <ti/drivers/watchdog/WatchdogCC26XX.h>
- /* Watchdog objects */
- WatchdogCC26XX_Object watchdogCC26XXObjects[SENSORTAG_CC2650_WATCHDOGCOUNT];
- /* Watchdog configuration structure */
- const WatchdogCC26XX_HWAttrs watchdogCC26XXHWAttrs[SENSORTAG_CC2650_WATCHDOGCOUNT] = {
- /* SENSORTAG_CC2650_WATCHDOG0 with 1 sec period at default CPU clock freq */
- {WDT_BASE, INT_WATCHDOG},
- };
- const Watchdog_Config Watchdog_config[] = {
- {&WatchdogCC26XX_fxnTable, &watchdogCC26XXObjects[0], &watchdogCC26XXHWAttrs[0]},
- {NULL, NULL, NULL},
- };
- /*
- * ============================= WatchDog End============================
- */
2.打开“C:\ti\tirtos_simplelink_2_13_00_06\packages\ti\boards\SRF06EB\CC2650EM_7ID”目录下的“Board.h”文件,在文件的最后添加如下代码:
[cpp] view plain copy
![]()
![]()
- /*!
- * @def CC2650_WatchdogName
- * @brief Enum of Watchdogs on the CC2650 dev board
- */
- typedef enum CC2650_WatchdogName {
- CC2650_WATCHDOG0 = 0,
- CC2650_WATCHDOGCOUNT
- } CC2650_WatchdogName;
- /*!
- * @def SENSORTAG_CC2650_WatchdogName
- * @brief Enum of Watchdogs on the SENSORTAG_CC2650 dev board
- */
- typedef enum SENSORTAG_CC2650_WatchdogName {
- SENSORTAG_CC2650_WATCHDOG0 = 0,
- SENSORTAG_CC2650_WATCHDOGCOUNT
- } SENSORTAG_CC2650_WatchdogName;
这样,RTOS中看门狗部分就配置好了,下面我们来看看应用层是如何配置的。
应用层配置
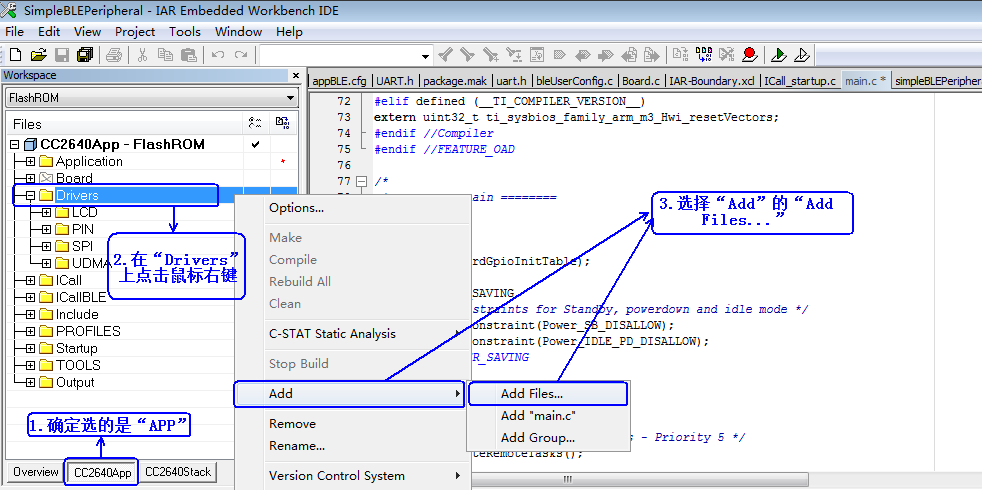
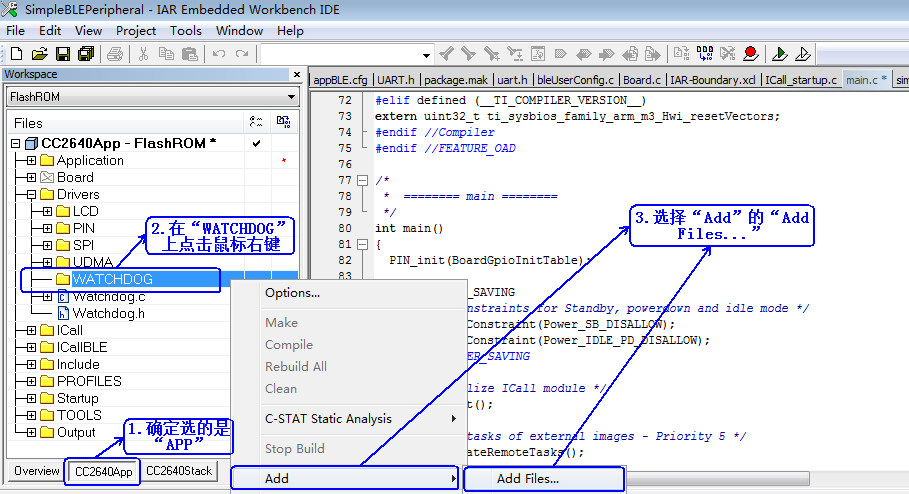
1.将驱动中看门狗相关的文件添加到编译选项中,选择“CC2640App”--->右键点击“Drivers”--->“Add”--->“Add Files...”,操作截图如下:
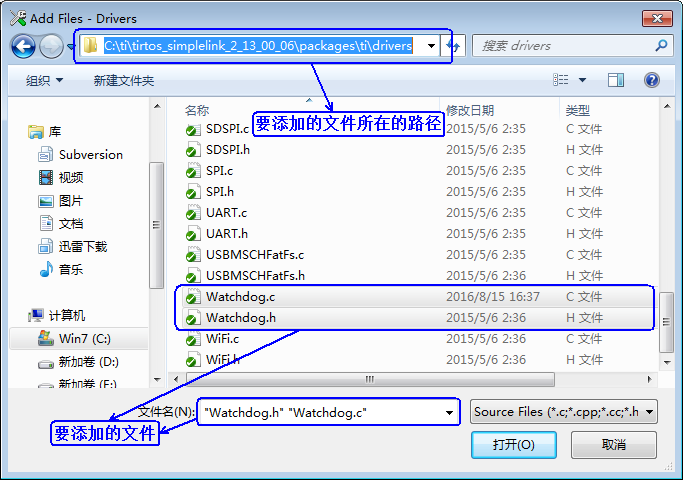
2.上述操作之后,会弹出文件添加的对话框,找到“C:\ti\tirtos_simplelink_2_13_00_06\packages\ti\drivers”目录下的“Watchdog.c”和“Watchdog.h”文件,选中之后,点击“打开”添加到工程中。操作显示如下:
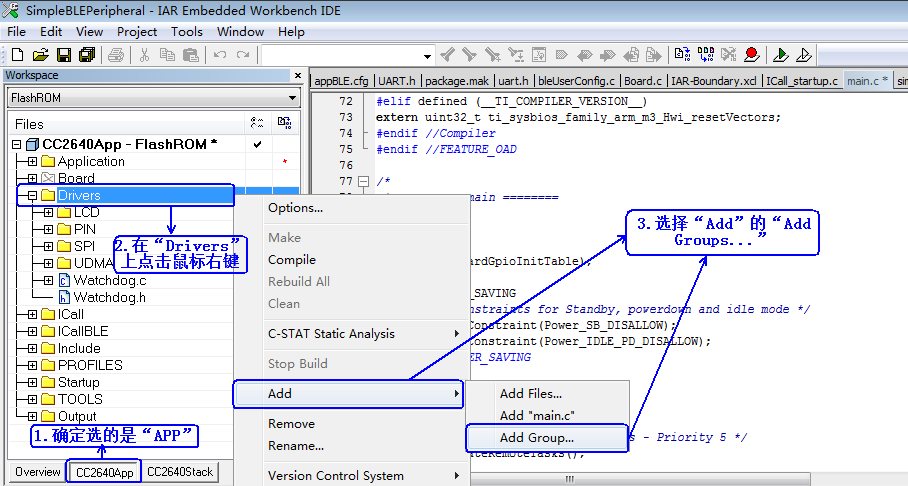
3.选择“CC2640App”--->右键点击“Drivers”--->“Add”--->“Add Group...”,操作截图如下:
在弹出的对话框中输入“WATCHDOG”,操作显示如下:
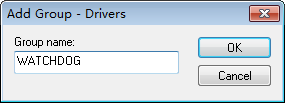
点击“OK”之后,结果如下:
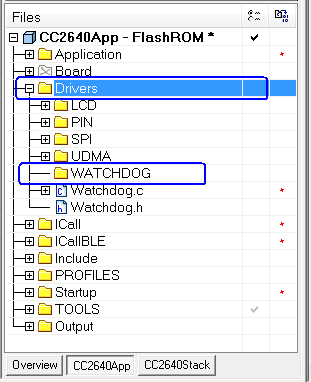
在“Drivers”文件夹下生成“WATCHDOG”文件夹。
4.在刚生成的“WATCHDOG”文件夹下添加“WatchdogCC26XX.c”和“WatchdogCC26XX.h”,这两个文件所在的路径为“C:\ti\tirtos_simplelink_2_13_00_06\packages\ti\drivers\watchdog”,操作显示如下:
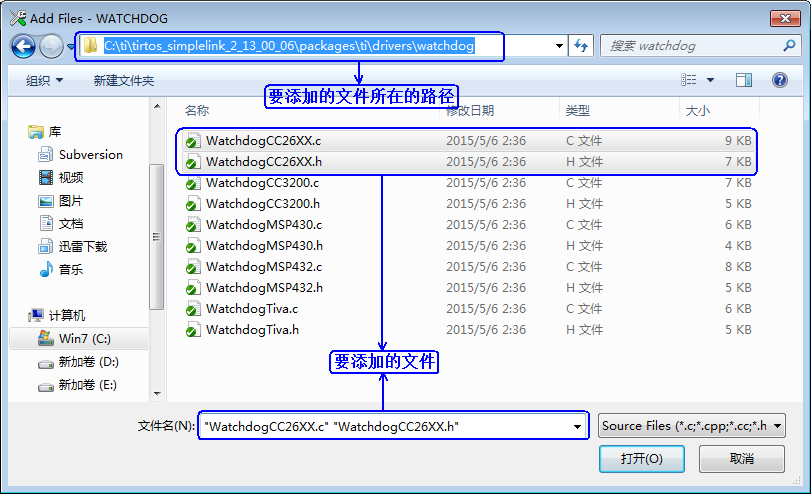
选中文件,点击“打开”,即可成功添加文件。
5.应用层初始化中调用看门狗的接口,打开“C:\ti\simplelink\ble_cc26xx_2_01_00_44423\Projects\ble\SimpleBLEPeripheral\CC26xx\Source\Application”目录下的“simpleBLEPeripheral.c”文件,在该文件中添加头文件引用:
[cpp] view plain copy
- #include <ti/drivers/Watchdog.h>
并添加我们封装的两个函数,源码如下:
[cpp] view plain copy
- void wdtCallback(UArg handle)
- {
- Watchdog_clear((Watchdog_Handle)handle);
- }
- void wdtInitFxn()
- {
- Watchdog_Params wp;
- Watchdog_Handle watchdog;
- Watchdog_Params_init(&wp);
- wp.callbackFxn = wdtCallback;
- wp.debugStallMode = Watchdog_DEBUG_STALL_ON;
- wp.resetMode = Watchdog_RESET_ON;
- watchdog = Watchdog_open(Board_WATCHDOG, &wp);
- Watchdog_setReload(watchdog, 1500000); // 1sec (WDT runs always at 48MHz/32)
- }
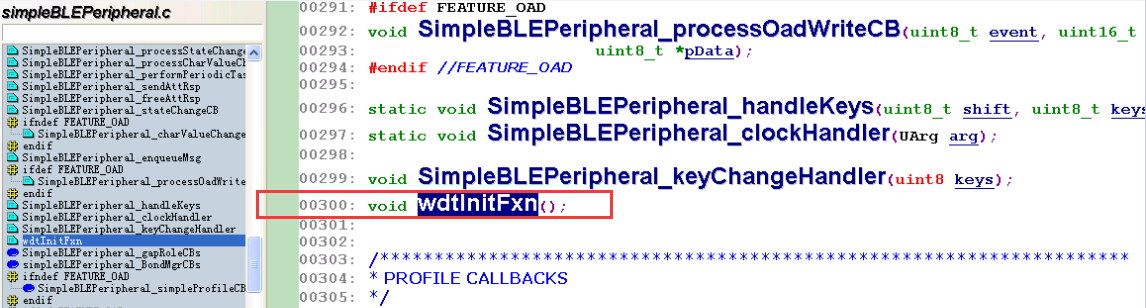
然后,在“simpleBLEPeripheral.c”文件的开头部分声明“wdtInitFxn”函数,截图如下:
最后,在“simpleBLEPeripheral.c”文件的初始化函数“SimpleBLEPeripheral_init”中调用看门狗“wdtInitFxn”函数。截图如下:
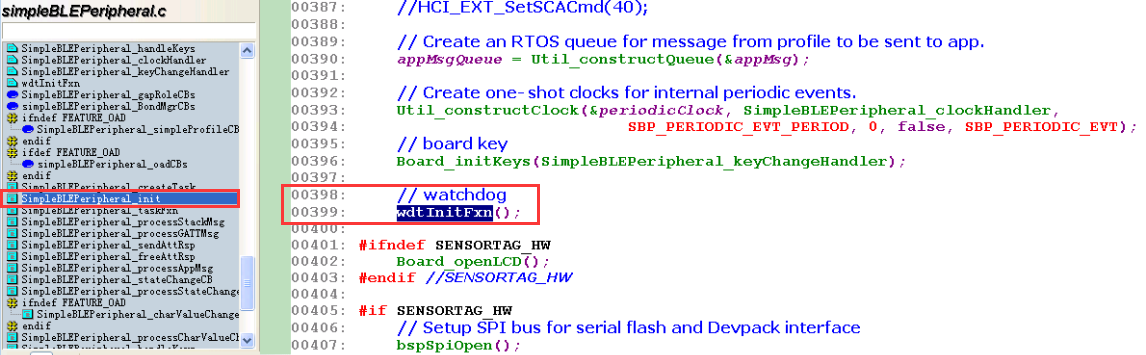
下面,我们来说明一下上述封装的两个函数,首先,我们可以看到“wdtInitFxn”函数中“wp.callbackFxn”的配置,该回调函数的配置是用来清除看门狗计时的,其实也就相当于我们常说的喂狗操作。在没有软件错误、程序正常允许的情况下,会定时触发该回调来喂狗,如果程序运行出现问题,该回调无法触发,看门狗达到设定的超时时间就会触发重启。
至于看门狗超时时间设置的问题,有的人会问为什么设置1500000就是1s呢?我们知道CC2640运行在48MHZ的频率,通过查阅资料,如下:

我们可以看到,计算看门狗超时时间的时候,需要除以32,也就是48MHZ除以32等于1.5MHZ,看门狗运行在1.5MHZ的频率上,也就是每计数一次等于1/1500000秒的时间,所以要实现1s超时时间,需要计数1500000次。这就是上面设置计数1500000即为1s的由来。
通过上述配置,我们的看门狗功能就添加完成了,通过实测,该看门狗配置方式可以起作用。另外,可能还有别的看门狗配置方法,后面研究出来之后,我们再继续讨论。