纯手工打造摇摆LED时钟
时间:10-02
整理:3721RD
点击:
看到市场上正在流行的时尚商品——摇摆LED 时钟,感觉非常新颖独特,正在玩单片机的我,激起了自己也想DIY 一个的冲动。不就是一个流水灯吗?有什么难的?! 于是,一个单片机项目就这样开始了。然而动手以后才知道问题并非想象那样简单,因没有任何现成的资料,机械的、电子的和编程的问题一大堆,一个一个需要自 己来解决。经历二十多天的苦战和无数次的修改与调试,作品终于完成,基本达到预先要求。
现将制作资料整理出来,与广大DIY 爱好者分享。
一. 整体方案
本制作是根据视觉暂留原理, 让一排8 只LED作往复运动, 在空中呈现八个字符的显示屏,可显示数字或英文字符。开机后先显示“Welcome!”欢迎字符(见图1), 再进入时钟显示状态。显示屏同时显示“时” 、“分” 、“秒”信息,用“:”分隔(见图2)。
图1 开机画面

图2 运行状态
显示分“正常运行”、“调分”和“调时” 三种状态。当处于调整状态时,调整的项会闪现,以便识别。为此,设置三个调整按键,一个为“状态键”,一个为“加法键”,一个为“减法键”。(见图3)

图3 按键的设置

图4 音圈电机组件
摇棒的动力部分采用从废旧硬盘拆下的音圈电机(见图4),驱动采用直流电机驱动方式。
结构方面,将音圈电机直接安装在万用板上,将万用板的四周用四根螺柱与一透明有机板结合成一体,构成支撑摇棒底座。(见图5, 图6)。
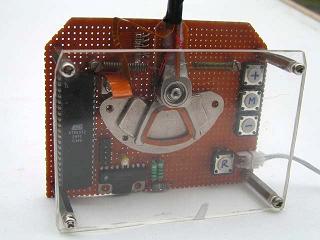
图5 万用板与有机板构成底座
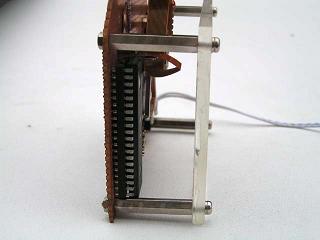
图6 底座侧面
二. 实作要点
1. 主板的结构布局见图7。
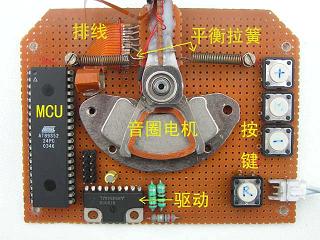
图7 主板布局
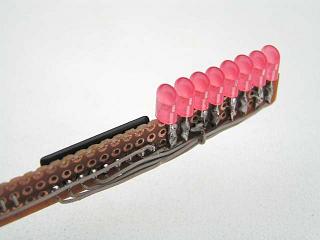
图8 摇棒上的LED
2.LED 的焊接,将LED 两脚跨接在电路板两端的方式进行焊接。使LED 紧密排列在一起。
3.摇棒上的LED 与主板上的信号用柔性排线连接,音圈电机供电占2 位,LED 信号传输占9 位,所以至少要11 位的排线。(见图9)
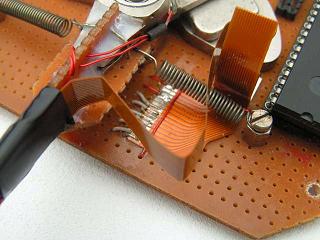
图9 排线与拉

图10 拉簧
4.为保持摇棒的平衡, 在摇棒接近旋转轴的两端加装两只拉簧,这两只拉簧的规格尽量保持一致,弹性强弱要适中,最好可多找几种规格的试试。(图9,图10)
5.采用驱动直流电机正反转的方式,驱动音圈电机来回摆动。让电机正、反转的方法很多,最典型的是H 桥电路驱动,H 桥电路原理见图11,常见的是用三级管代替图中的开关。
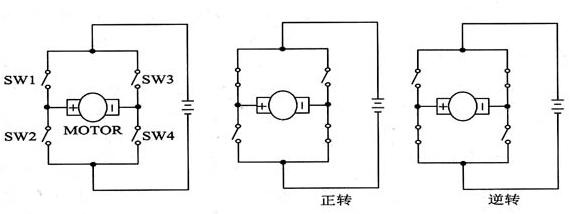
图11 H 桥驱动原理
为了简化电路,最好采用H 桥功能的集成电路。这种IC 很多,比如象TA7257,TA8429H,L6203 等,这里用的是三菱公司的M54544AL(见图12)。IC 各脚定义见图13。
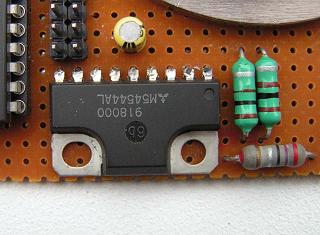
图12 电机驱动IC
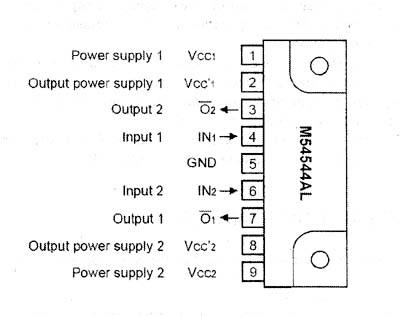
图13 M56544AL 各脚定义
6.电原理图见图14。
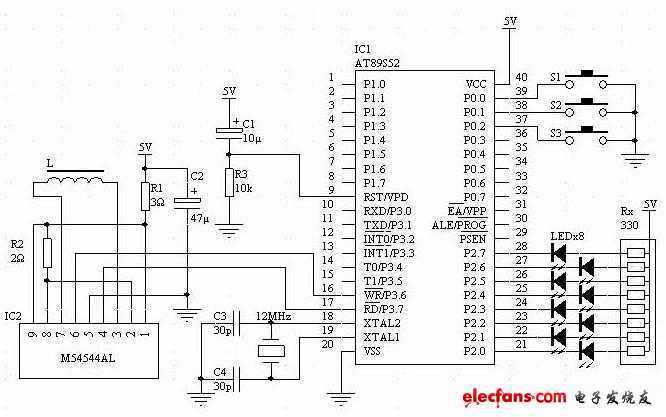
图14 电原理图
7.完成图见图15。
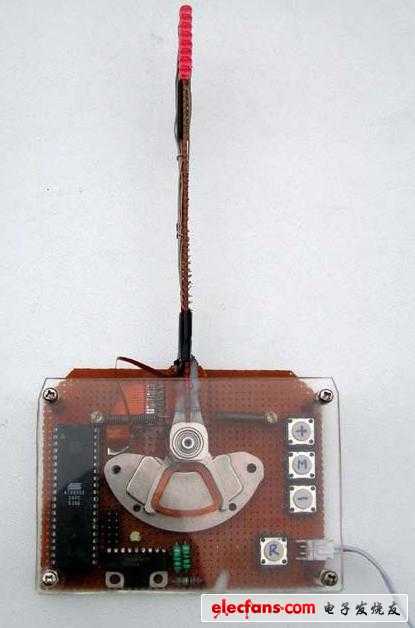
图15 完成图
三. 软件设计
1. 摇棒的启动
为了使摇棒从静止状态过度到正常运行状态,在正式显示前加一启动程序。其实质就是逐渐加快驱动的频率,一直到摇棒正常摆动为止。通过下面的代码实现
do {
mm++;
Delay(120+mm);
put1=~put1; put2=~put2;
}while(mm<60);
Delay(20); //根据实际情况确定延时值
2. 秒闪现的实现:数字或字符的闪现是通过变量Ms 和数组w[]实现的,如需要八位字符中的间的第4 位闪现,则w[3]=1。这是通过全局变量Ms 在void timer0(void)函数中每隔一秒改变一次状态(0 或1),打开或关闭显示。
if(Ms*w[ii-3]==1) P2=0xff; else P2=~ASCIIDOC[v[ii]*6+jj]; //正向显示
if(Ms*w[10-ii]==1) P2=0xff; else P2=~ASCIIDOC[v[13-ii]*6+5-jj]; //反向显示
3. 调试中发现,显示屏上的字符并不是一样宽的(见图16),仔细分析是由于摇棒在运动中,一直受力,而且所受的力是随时变化的。为方便精确调整显示,特别作了一个显示中断表Tr[],改变显示LED 的时间段,协调显示效果。

图16 调整前的显示
4. 按键去抖程序
按键的去抖采用软件编程实现,其方法是当检测到按键的接口出现低电平后,隔一段时间再检测,如还是低电平,则确认为有效,否则无效。具体的程序是通过函数unsigned char ChKey(bit Key)完成的。
5. 显示同步
因没有位置传感器,显示同步完全靠时钟中断来确定。这样就有一个问题,音圈电机的驱动信号在什么时刻改变,显示才能保持在中间,并能保证正反显示能很好地重合。经实际观察, 音圈电机的驱动信号在显示中部, 要根据具体情况细调。由程序中的变量Ta 调试确定。
6. 完整C51 程序代码
- /*
- POV 摇摆显示LED 钟C51 程序
- 周正华编
- 2008.3.19
- */
- #include
- /*硬件端口定义*/
- sbit set0=P0^1;
- sbit set1=P0^0;
- sbit set2=P0^2;
- sbit put1=P3^6;
- sbit put2=P3^7;
- /*时钟用数组*/
- unsigned char BUFFER[]={0,0,0,0};
- unsigned char maxnum[]={59,23};
- /*显示数组*/
- unsigned int v[14];
- unsigned int w[8];
- /*显示中断表*/
- int code Tr[]={
- 2000,2000,2000,2000,2000,2000,
- 2000,2000,2000,2000,2000,2000,
- 2000,2000,2000,2000,2000,2000,
- 2550,2500,2450,2400,2350,2300,
- 2250,2200,2150,2100,2050,2000,
- 1950,1900,1850,1800,1750,1700,
- 1650,1600,1550,1500,1450,1400,
- 1400,1450,1500,1550,1600,1650,
- 1700,1750,1800,1850,1900,1950,
- 2000,2050,2100,2150,2200,2250,
- 2300,2350,2400,2450,2500,2550,
- 2000,2000,2000,2000,2000,2000,
- 2000,2000,2000,2000,2000,2000,
- 2000,2000,2000,2000,2000,2000,
- };
- /*字符字模*/
- unsigned char code ASCIIDOC[] = // ASCII
- {
- 0x7C,0x8A,0x92,0xA2,0x7C,0x00, // -0-00
- 0x00,0x42,0xFE,0x02,0x00,0x00, // -1-01
- 0x46,0x8A,0x92,0x92,0x62,0x00, // -2-02
- 0x84,0x82,0x92,0xB2,0xCC,0x00, // -3-03
- 0x18,0x28,0x48,0xFE,0x08,0x00, // -4-04
- 0xE4,0xA2,0xA2,0xA2,0x9C,0x00, // -5-05
- 0x3C,0x52,0x92,0x92,0x8C,0x00, // -6-06
- 0x80,0x8E,0x90,0xA0,0xC0,0x00, // -7-07
- 0x6C,0x92,0x92,0x92,0x6C,0x00, // -8-08
- 0x62,0x92,0x92,0x94,0x78,0x00, // -9-09
- 0x00,0x00,0x00,0x00,0x00,0x00, // - -10
- 0x00,0x00,0xFA,0x00,0x00,0x00, // -!-11
- 0x04,0x08,0x10,0x20,0x40,0x00, // -/-12
- 0x00,0x6C,0x6C,0x00,0x00,0x00, // -:-13
- 0x3E,0x48,0x88,0x48,0x3E,0x00, // -A-14
- 0xFE,0x92,0x92,0x92,0x6C,0x00, // -B-15
- 0x7C,0x82,0x82,0x82,0x44,0x00, // -C-16
- 0xFE,0x82,0x82,0x82,0x7C,0x00, // -D-17
- 0xFE,0x92,0x92,0x92,0x82,0x00, // -E-18
- 0xFE,0x90,0x90,0x90,0x80,0x00, // -F-19
- 0x7C,0x82,0x8A,0x8A,0x4E,0x00, // -G-20
- 0xFE,0x10,0x10,0x10,0xFE,0x00, // -H-21
- 0x00,0x82,0xFE,0x82,0x00,0x00, // -I-22
- 0x04,0x02,0x82,0xFC,0x80,0x00, // -J-23
- 0xFE,0x10,0x28,0x44,0x82,0x00, // -K-24
- 0xFE,0x02,0x02,0x02,0x02,0x00, // -L-25
- 0xFE,0x40,0x30,0x40,0xFE,0x00, // -M-26
- 0xFE,0x20,0x10,0x08,0xFE,0x00, // -N-27
- 0x7C,0x82,0x82,0x82,0x7C,0x00, // -O-28
- 0xFE,0x90,0x90,0x90,0x60,0x00, // -P-29
- 0x7C,0x82,0x8A,0x84,0x7A,0x00, // -Q-30
- 0xFE,0x90,0x98,0x94,0x62,0x00, // -R-31
- 0x64,0x92,0x92,0x92,0x4C,0x00, // -S-32
- 0x80,0x80,0xFE,0x80,0x80,0x00, // -T-33
- 0xFC,0x02,0x02,0x02,0xFC,0x00, // -U-34
- 0xF8,0x04,0x02,0x04,0xF8,0x00, // -V-35
- 0xFE,0x04,0x18,0x04,0xFE,0x00, // -W-36
- 0xC6,0x28,0x10,0x28,0xC6,0x00, // -X-37
- 0xC0,0x20,0x1E,0x20,0xC0,0x00, // -Y-38
- 0x86,0x8A,0x92,0xA2,0xC2,0x00, // -Z-39
- 0x24,0x2A,0x2A,0x1C,0x02,0x00, // -a-40
- 0xFE,0x14,0x22,0x22,0x1C,0x00, // -b-41
- 0x1C,0x22,0x22,0x22,0x10,0x00, // -c-42
- 0x1C,0x22,0x22,0x14,0xFE,0x00, // -d-43
- 0x1C,0x2A,0x2A,0x2A,0x10,0x00, // -e-44
- 0x10,0x7E,0x90,0x90,0x40,0x00, // -f-45
- 0x19,0x25,0x25,0x25,0x1E,0x00, // -g-46
- 0xFE,0x10,0x20,0x20,0x1E,0x00, // -h-47
- 0x00,0x00,0x9E,0x00,0x00,0x00, // -i-48
- 0x00,0x01,0x11,0x9E,0x00,0x00, // -j-49
- 0xFE,0x08,0x14,0x22,0x02,0x00, // -k-50
- 0x00,0x82,0xFE,0x02,0x00,0x00, // -l-51
- 0x1E,0x20,0x1E,0x20,0x1E,0x00, // -m-52
- 0x20,0x1E,0x20,0x20,0x1E,0x00, // -n-53
- 0x1C,0x22,0x22,0x22,0x1C,0x00, // -o-54
- 0x3F,0x24,0x24,0x24,0x18,0x00, // -p-55
- 0x18,0x24,0x24,0x24,0x3F,0x00, // -q-56
- 0x20,0x1E,0x20,0x20,0x10,0x00, // -r-57
- 0x12,0x2A,0x2A,0x2A,0x24,0x00, // -s-58
- 0x20,0xFC,0x22,0x22,0x24,0x00, // -t-59
- 0x3C,0x02,0x02,0x3C,0x02,0x00, // -u-60
- 0x38,0x04,0x02,0x04,0x38,0x00, // -v-61
- 0x3C,0x02,0x3C,0x02,0x3C,0x00, // -w-62
- 0x22,0x14,0x08,0x14,0x22,0x00, // -x-63
- 0x39,0x05,0x05,0x09,0x3E,0x00, // -y-64
- 0x22,0x26,0x2A,0x32,0x22,0x00, // -z-65
- };
- unsigned int Ti;
- unsigned char ii,jj,mm, ff ,TZ ,Ms ,Ta;
- /*延时程序*/
- void Delay(unsigned int msec)
- {
- unsigned int x,y;
- for(x=0; x<=msec;x++)
- {
- for(y=0;y<=110;y++);
- }
- }
- /*键盘去抖处理函数*/
- unsigned char ChKey(bit Key)
- {
- if(Key==0){
- Delay(100);
- if(Key==0) return(1);
- }
- }
- /*定时中断1 处理(时钟)函数*/
- void timer0(void) interrupt 1 using 1
- {
- TH0=-(50000/256);
- TL0=-(50000%256);
- TR0=1;
- BUFFER[0]=BUFFER[0]+1;
- }
- /*定时中断2 处理(LED 驱动和音圈驱动)函数*/
- void timer1(void) interrupt 3 using 1
- {
- TH1=Ti/256; TL1=Ti%256;
- if((ii*6+jj)==Ta) {put1=~put1;put2=~put2;}; //音圈电机驱动输出
- if(ff==1){
- if(Ms*w[ii-3]==1) P2=0xff; else P2=~ASCIIDOC[v[ii]*6+jj]; //正向显示
- }
- else {
- if(Ms*w[10-ii]==1) P2=0xff; else P2=~ASCIIDOC[v[13-ii]*6+5-jj]; //反向显示
- }
- jj++;
- if(jj>5) {ii++; jj=0;}
- if(ii>13) {ii=0;ff=!ff;}
- Ti=-Tr[ii*6+jj]; //读显示中断表
- }
- /*主程序*/
- void main(void)
- {
- //变量初始化
- Ms=0;
- ff=0;
- Ta=46; //正反显一致性调整, 取值范围在42~50 之间, 根据实际确定
- put1=0;put2=1;
- //中断初始化
- TMOD=0x11;
- TH0=-5000/256; TL0=-5000%256;
- TR0=1;ET0=1;
- TH1=-2000/256; TL1=-2000%256;
- TR1=1;ET1=1;
- //十四个字符中前三个和后三个不显(不用)
- v[0]=10;
- v[1]=10;
- v[2]=10;
- v[11]=10;
- v[12]=10;
- v[13]=10;
- /*摇摆棒初始启动*/
- do {
- mm++;
- Delay(120+mm);
- put1=~put1; put2=~put2;
- }while(mm<60);
- Delay(20);
- /*启动显示*/
- ii=0;jj=0;
- EA=1;
- /*正式运行*/
- for(;;){
- v[3]=36;v[4]=44;v[5]=51;v[6]=42;v[7]=54;v[8]=52;v[9]=44;v[10]=11; //显示欢迎
- Delay(6000);
- v[3]=10;v[4]=10;v[5]=10;v[6]=10;v[7]=10;v[8]=10;v[9]=10;v[10]=10; //关闭显示
- Delay(600);
- v[3]=0;v[4]=0;v[5]=13;v[6]=0;v[7]=0;v[8]=13;v[9]=0;v[10]=0; //显示时钟初始状
- 态
- /*进入时钟状态*/
- while(1){
- //时钟处理
- if (BUFFER[0]>21){ //进位到秒
- BUFFER[0]=0; BUFFER[1]=BUFFER[1]+1;
- Ms=!Ms;
- if (BUFFER[1]==60){ //进位到分
- BUFFER[1]=0;BUFFER[2]=BUFFER[2]+1;
- if (BUFFER[2]==60){
- BUFFER[2]=0;BUFFER[3]=BUFFER[3]+1; //进位到时
- if (BUFFER[3]==24) BUFFER[3]=0;
- }
- }
- }
- //将显示内容送显示缓冲区
- v[9]=BUFFER[1]/10;
- v[10]=BUFFER[1]-v[9]*10;
- v[6]=BUFFER[2]/10;
- v[7]=BUFFER[2]-v[6]*10;
- v[3]=BUFFER[3]/10;
- v[4]=BUFFER[3]-v[3]*10;
- //键盘处理
- if(ChKey(set0)==1){ //模式键
- Ms=1; //秒闪开
- if(TZ<2) TZ++; else TZ=0; //三种状态循环转换
- switch(TZ){
- case 0:w[0]=0;w[1]=0;w[2]=0;w[3]=0;w[4]=0;w[5]=0;w[6]=0;w[7]=0;break;
- case 1:w[0]=0;w[1]=0;w[2]=0;w[3]=1;w[4]=1;w[5]=0;w[6]=0;w[7]=0;break;
- case 2:w[0]=1;w[1]=1;w[2]=0;w[3]=0;w[4]=0;w[5]=0;w[6]=0;w[7]=0;break;
- }
- Ms=0; //秒闪关
- };
- Delay(80);
- if(ChKey(set1)==1){ if(BUFFER[TZ+1]
- BUFFER[TZ+1]=0;Delay(300);};
- //键盘"+"
- if(ChKey(set2)==1){ if(BUFFER[TZ+1]>0) BUFFER[TZ+1]--; else
- BUFFER[TZ+1]=maxnum[TZ-1];Delay(300);};
- //键盘"-"
- Delay(80);
- }
- }
- }
虽说是个机电一体的制作,但调试过程并不复杂。
1. 机械部分的调整主要是两只拉簧, 要尽量保证两边受力一致,让摇棒静态时保持在竖直状态。
2. 软件部分,先将void timer1(void)函数中的“Ti=-Tr[ii*6+jj];”这段程序删除,试着让Ti 取一常数值(大约-2000 左右)看显示效果(摇棒摆动的幅度),一直到满意为止,这时正反显示可能没有重合,接着试Ta 的取值,范围在42 到50 之间,使正反显示重合为止。最后一步就是调整显示的不均匀性,将“Ti=-Tr[ii*6+jj];”这段程序恢复回来,试着改变Tr[]表中数组元素的 值,并保证表中的元素的平均值为开始Ti 取得的值,让显示的每个字符宽度一致为止。
五.结语
本制作电路简单,其原理实质就是LED 流水灯,而关键的音圈电机也很容易找到,很适合刚入门的单片机爱好者制作。制作还有发挥的地方,
1. 添加时钟IC,使显时更精准,而且不怕掉电;
2. 加装位置传感器,增加显示的稳定性;
3. 增添摇控功能,使调整更方便。
沙发,多谢 了
好设计, 学习...
!太帅了
不错,才发现那个电机那里加两个弹簧就可以那样来回摆了。
支持。
niuren hao !
LZ原创吗?
有点难度。只能路过
不错啊,顶
支持!
LZ,借鉴是需要用“转载”两个字的。
原帖地址:
http://bbs.elecfans.com/forum.php?mod=viewthread&tid=222024
这个很久以前我都在网上看到过了
就是,怎么能不加转载呢?
LZ 你呗发现了
是的要注明源地址。
很给力,收集材料中