大家来帮我看看这个温度控制系统的程序 有点不太懂
调试程序:(自定义头函数见附录Ⅰ)
#include "C8051F020.h"
#include "absacc.h"
#include "data_define.c"
#include "Init_Device.c"
#include "address.h" //设备地址列表
#include "keytable.h" //键盘的键值表
#include "digtaltable.h" //数码管的编码表
static unsigned int DataT=0; //16进制的A/D数据
static int DataTO=0; //10进制的温度数据
static unsigned int DataTI=0; //10进制的目标温度(临时)
static unsigned int TargetT=0; //10进制的目标温度
static char tp=0; //目标温度和当前温度的差值
static unsigned int sign=0; //表示tp的正负号
static unsigned char Switch=0; //开关键是否按下的标志
static unsigned int Input=0; //输入
void delay(void);
void delay1(void);
void Display(const unsigned int,const unsigned int);
unsigned int Convert(const unsigned int);
unsigned int ReadT(void);
unsigned int ReadKey(void);
unsigned int ReadKeyS(void);
unsigned int Decode(unsigned int);
unsigned int ReadInput(void);
void Task(void);
void main(void)
{
Init_Device();
while(1)
{
ReadInput(); //读取键盘
Task(); //对温度进行调整(主任务)
}
}
unsigned int Convert(const unsigned int a)
{
return (int) 95*a/0xff; //返回值=输入数据*95/255 (取整数) 返回值范围(0~95)
}
unsigned int ReadT(void)
{
C2=0; //向A/D转换器发出指令
delay(); //等待采样完成
return C2; //返回采样数据数据
}
void Display(const unsigned int x,const unsigned int z)
{
C13=DT3[z/10]; //第三个数码管,显示第二个数字的个位
C14=DT4[z%10]; //第四个数码管,显示第二个数字的十位
C11=DT1[x/10]; //第一个数码管,显示第一个数字的个位
C12=DT2[x%10]; //第二个数码管,显示第一个数字的十位
}
void delay(void) //延时子程序
{
long int i;
for(i=0;i<0x1f0;++i) ;
}
void delay1(void)
{
long int i;
for(i=0;i<0x81f0;++i) ;
}
unsigned int ReadKeyS(void)
{
unsigned char temp=0;
unsigned char temp1=0;
unsigned char i=0;
temp=C43; //读取键盘第三行
temp=0x1f&C43; //屏蔽高3位
if(temp==0x1f) //如果没有按下,退出
{
return 0xff;
}
temp1=temp; //如有按下,则延时后再读一次,看看是不是抖动
delay();
temp=0x1f&C43;
if(temp!=temp1) //两次读取值不同,说明是抖动,退出
{
return 0xff;
}
if(temp==0x1e) //是第三行第一列的键,则返回K11(在keytable定义)
{
return K11;
}
if(temp==0x1d) //是第三行第二列的键,对Switch做求反操作,则返回K12(在keytable定义)
{
Switch=~Switch;
return K12;
}
}
unsigned int ReadKey(void)
{
unsigned int temp=0;
unsigned int i=0;
while(1)
{
temp=0x1f&C41; //扫描第一行,看有无按下
if(temp!=0x1f) //第一行如有有按下,则跳出while循环
{
i=0x0;
break;
}
temp=0x1f&C42; //扫描第二行,看有无按下
if(temp!=0x1f) //第二行如有有按下,则跳出while循环
{
i=0x40;
break;
}
temp=0x1f&C43; //扫描第三行,看有无按下
if(temp!=0x1f) //第三行如有有按下,则跳出while循环
{
i=0x80;
break;
}
temp=0x1f&C44; //扫描第四行,看有无按下
if(temp!=0x1f) //第四行如有有按下,则跳出while循环
{
i=0xC0;
break;
}
return 0xff; //都没有按下,返回0xff
}
return i|temp; //将高三位和低五位合并
}
unsigned int Decode(unsigned int a) //对键值解码
{
switch(a)
{
case K1:
return 1;
case K2:
return 2;
case K3:
return 3;
case K4:
return 4;
case K5:
return 5;
case K6:
return 6;
case K7:
return 7;
case K8:
return 8;
case K9:
return 9;
case K10:
return 0;
case K11:
return 10;
default:
return 0xff;
}
}
unsigned int ReadInput(void)
{
unsigned int key=0;
unsigned int i=0;
unsigned int temp=0;
key=ReadKeyS(); //读取开关键是否按下
i=Decode(ReadKeyS()); //对读取的键值解码
if(i!=10) //如果不等于开关键(10为开关键解码后的值),则不读数据,退出
{
return 0xff;
}
Display(0,DataTO); //数码管的输入区清零
//delay1();
while(1)
{
key=ReadKey(); //读取第一个键值(十位)
i=Decode(key); //解码
if(i<10) //如果是前二行的键值,则更新DataTI(临时的输入数据)
{
DataTI=i; //更新DataTI
Display(DataTI,DataTO); //更新数码管,显示输入的数字
break;
}
Task(); //和main()的那个Task()相同,目的是防止输入数据的时候单片机失去控温能力
}
while(1)
{
key=ReadKey(); //读取键值
if(key==0xff) //等键盘松开
break;
Task();
}
while(1)
{
key=ReadKey(); //读取第二个键值(个位)
i=Decode(key); //解码
if(i<10) //如果是前二行的键值,则更新DataTI(临时的输入数据)
{
DataTI=DataTI*10+i; //更新DateTI数据
Display(DataTI,DataTO); //更新数码管,显示输入的数字
TargetT=DataTI; //更新目标温度(正式)
break;
}
Task();
}
return DataTI; //返回输入的数据
}
void Task(void)
{
DataT=ReadT(); //读取A/D的数据
DataTO=Convert(DataT); //把A/D数据转化为10进制的温度数据
if(DataTI>95) //如果温度大于95度,就修正为96度(95度时温度变送器为5V)
{
DataTI=95;
}
tp=TargetT-DataTO; //目标温度和目标温度的差值
if(tp<0) //如果为负
{
tp=~tp+1; //求差值绝对值
sign=1; //符号位标记为1(1为负数,0为正数)
}
else
{
sign=0; //符号位标记为0(1为负数,0为正数)
}
//分三段控制,0~30度,31~70度,71~95度
if(DataTO<31); //第一段
{
while(1)
{
if(tp<1) //如果差值为0,则令驱动器空载(0V)
{
C3=0x80;
break;
}
if(tp<4&&sign==0) //如果差值小于4且为正数,令驱动器加热(但不是满载)
{
C3=170;
break;
}
if(tp<4&&sign==1) //如果差值小于4且为负数,令驱动器冷却(但不是满载)
{
C3=30;
break;
}
if(sign==1) //如果差值大于4且为负数,令驱动器冷却(满载)
{
C3=0;
break;
}
if(sign==0) //如果差值大于4且为正数,令驱动器加热(满载)
{
C3=255;
break;
}
break;
}
}
if(DataTO<71&&DataTO>30); //第二段
{
while(1)
{
if(tp<1) //如果差值为0,则令驱动器空载(0V)
{
C3=0x80;
break;
}
if(tp<4&&sign==0) //如果差值小于4且为正数,令驱动器加热(但不是满载)
{
C3=220;
break;
}
if(tp<4&&sign==1) //如果差值小于4且为负数,令驱动器冷却(但不是满载)
{
C3=75;
break;
}
if(sign==1) //如果差值大于4且为负数,令驱动器冷却(满载)
{
C3=0;
break;
}
if(sign==0) //如果差值大于4且为正数,令驱动器加热(满载)
{
C3=255;
break;
}
break;
}
}
if(DataTO<96&&DataTO>70); //第三段
{
while(1)
{
if(tp<1) //如果差值为0,则令驱动器空载(0V)
{
C3=0x80;
break;
}
if(tp<4&&sign==0) //如果差值小于4且为正数,令驱动器加热(但不是满载)
{
C3=255;
break;
}
if(tp<4&&sign==1) //如果差值小于4且为负数,令驱动器冷却(但不是满载)
{
C3=100;
break;
}
if(sign==1) //如果差值大于4且为负数,令驱动器冷却(满载)
{
C3=0;
break;
}
if(sign==0) /如果差值大于4且为正数,令驱动器加热(满载)
{
C3=255;
break;
}
break;
}
}
Display(DataTI,DataTO); //更新数码管显示
return;
}
address.h:
#define C11 XBYTE[0xE000] //第一个数码管
#define C12 XBYTE[0xE100] //第二个数码管
#define C13 XBYTE[0xE200] //第三个数码管
#define C14 XBYTE[0xE300] //第四个数码管
#define C3 XBYTE[0xBF00] //D/A转换器
#define C2 XBYTE[0xDF00] //A/D转换器
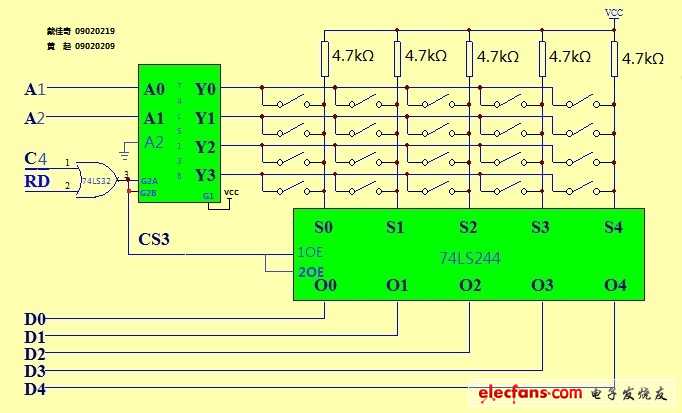
#define C40 XBYTE[0x7F00] //键盘
#define C41 XBYTE[0x7000] //键盘第一行
#define C42 XBYTE[0x7100] //键盘第二行
#define C43 XBYTE[0x7200] //键盘第三行
#define C44 XBYTE[0x7300] //键盘第四行
keytable.h:
#define K1 0x1E
#define K2 0x1D
#define K3 0x1B
#define K4 0x17
#define K5 0x0F
#define K6 0x5E
#define K7 0x5D
#define K8 0x5B
#define K9 0x57
#define K10 0x4F
#define K11 0x9E
#define K12 0x9D
digtaltable.h:
#define D10 0x50
#define D11 0xF9
#define D12 0x4A
#define D13 0x49
#define D14 0xE1
#define D15 0x45
#define D16 0x44
#define D17 0xD9
#define D18 0x40
#define D19 0x41
#define D20 0x0C
#define D21 0xAF
#define D22 0xC8
#define D23 0x8A
#define D24 0x2B
#define D25 0x1A
#define D26 0x18
#define D27 0x8F
#define D28 0x08
#define D29 0x0A
#define D30 0x44
#define D31 0xF5
#define D32 0x86
#define D33 0x85
#define D34 0x35
#define D35 0x0D
#define D36 0x0C
#define D37 0xE5
#define D38 0x04
#define D39 0x05
#define D40 0x0C
#define D41 0xEE
#define D42 0x58
#define D43 0x4A
#define D44 0xAA
#define D45 0x0B
#define D46 0x09
#define D47 0x6E
#define D48 0x08
#define D49 0x0A
#define DT1 digtaltable1
#define DT2 digtaltable2
#define DT3 digtaltable3
#define DT4 digtaltable4
code const unsigned int digtaltable1[]; //存放第一个数码管编码的数组
code const unsigned int digtaltable2[]; //存放第二个数码管编码的数组
code const unsigned int digtaltable3[]; //存放第三个数码管编码的数组
code const unsigned int digtaltable4[]; //存放第四个数码管编码的数组
我想知道最后的键值表以及数码管编码表干什么用的 以及是怎么计算的 谢谢 各位了
附上图
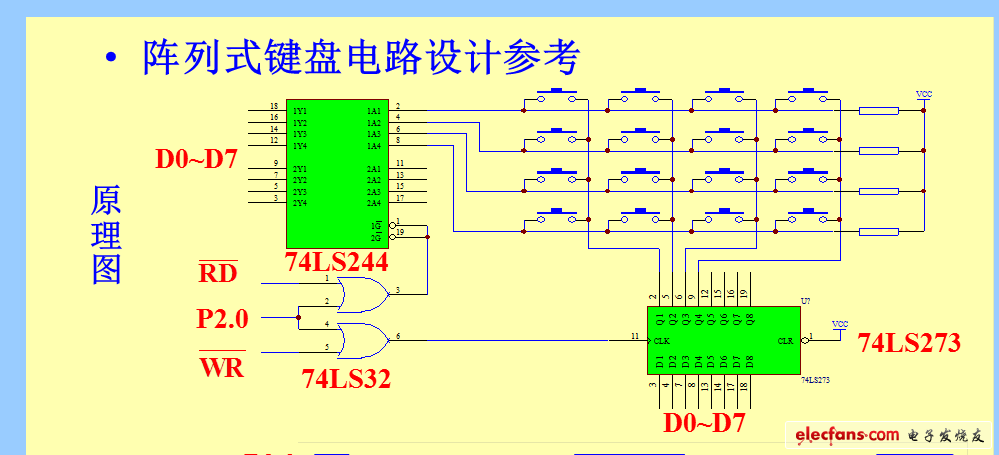
键盘原理图
显示原理图

#define C11 XBYTE[0xE000] //第一个数码管
#define C12 XBYTE[0xE100] //第二个数码管
#define C13 XBYTE[0xE200] //第三个数码管
#define C14 XBYTE[0xE300] //第四个数码管
#define C3 XBYTE[0xBF00] //D/A转换器
#define C2 XBYTE[0xDF00] //A/D转换器
#define C40 XBYTE[0x7F00] //键盘
#define C41 XBYTE[0x7000] //键盘第一行
#define C42 XBYTE[0x7100] //键盘第二行
#define C43 XBYTE[0x7200] //键盘第三行
#define C44 XBYTE[0x7300] //键盘第四行
加红的地址是怎么来的 呢 小弟初学单片机 问的问题比较白痴望好心人耐心解答谢谢!
我现在用的键盘是这个方案 键值表用改吗
好像有点夸张了,只是简单的静态数码管显示而已,用51+ZLG7289+键盘搞定了
好像有点长
在学校的做的话是可以的。多学习一下芯片的操作是不错的。
工作中就算了吧。
研究一下
貌似注释快加满了,不如你哪句不明白还是单独问吧,这样不太好回答,嘻嘻
看不懂...帮顶好了