Motorola和TI的SPI的区别
请教一下Motorola和TI的SPI有什么区别?
谢谢
Hi hao,
如果是SPI接口,那么应该是一样的,因为都要遵守SPI的规范。如果你问的是TI的类SPI接口,请参考下面的描述。
SSI(Synchronous Serial Interface)由TI公司定义的接口协议标准
SPI(Serial Peripheral Interface)是由Motorola公司定义的接口协议标准,两者的用法有类似的地方
SPI串行帧同步SSIFss为低电平有效,在整个帧传输期间生效(拉低)。
SSI串行帧同步SSIFss在发送每个帧之前产生宽度为个时钟周期的高脉冲。SSI 模块和片外从设备都在SSIClk 的上升沿驱动输出数据,在SSIClk 的下降沿锁存另一端的输入数据。
有没有具体的器件可以明确比较?
TI芯片中的SPI接口也是符合Mororola的SPI协议规范的,没有什么差别。你是看到哪款芯片中的SPI和协议不同吗?
首先谢谢二位指教,我是用STM32F407控制ADS8568和NRF24L01做数据采集。对于Motorola的SPI还算有些了解,就是发数据时把NSS一直拉低,直到发送完了才拉高,当然也可以一直拉低。TI的SPI我看了一下貌似就是NSS有所区别,譬如要发送一个字节,先给NSS一个高电平脉冲选中设备,高电平脉冲之后开始传数据,开始传输之后NSS的电平好像就没什么影响了,如下图所示
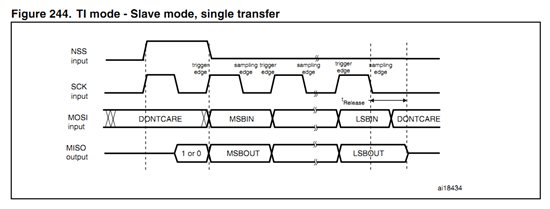
从上面那个图来看发送单个字节TI和Motorola的SPI在NSS拉低之后没什么区别,但是再看下图连续传输
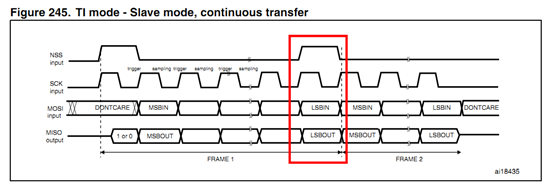
很明显的是那个FRAME1的LSB还没有传完NSS就拉高了,NSS高电平脉冲之后又开始了第二帧,所以认为TI的SPI开始传输数据的是给NSS一个高电平脉冲,而Motorola的是给NSS拉低。Motorola方式连续传数据只需要给NSS一直拉低,而TI方式每传一个字节都要给NSS一个脉冲。不知我理解的是否正确?