电子制作常用器件——舵机
时间:10-02
整理:3721RD
点击:
由外壳、电路板、无核心马达、齿轮与位置检测器所构成。其工作原理是由接收机发出讯号给舵机,经由电路板上的 IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。位置检测器其实就是可变电阻,当舵机转动时电阻值也会随之改变,藉由检测电阻值便可知转动的角度。
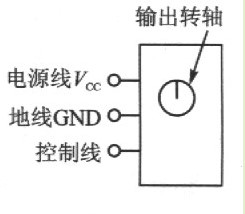
标准的舵机有三条线,分别是:电源线,地线,控制线。如图所示:

以日本FUTABA-S3003型舵机为例,如图是FUFABA-S3003型舵机的内部电路。
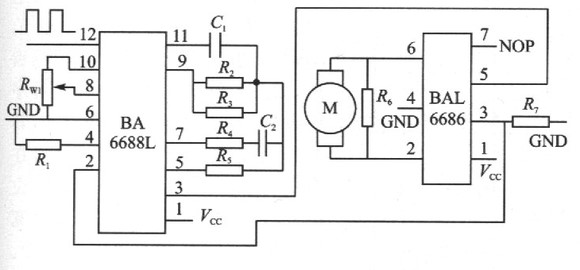
3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。
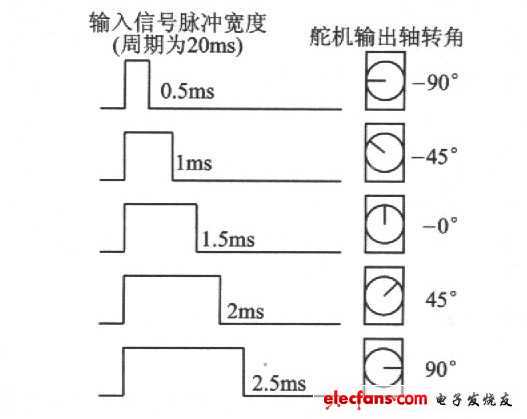
电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用下图来表示。
谢谢管理员 我学习个。
学习啦 谢谢管理员
学习啦 谢谢管理员
好好学习
这对我来说是新知识,过去没有接触过。
以前从来没有接触过。
不错
好贴呀,这对我来说是新知识,过去没有接触过。学习长见识了,支持!
谢谢小编。
一直觉得舵机很神奇,这么小,扭矩超大
对于这个只是简单用过,
有意思
收了
学习中!
挺好的
没有接触过,学习学习
智能车必备
xiexie