求步进电机虚拟控制系统设计
时间:10-02
整理:3721RD
点击:
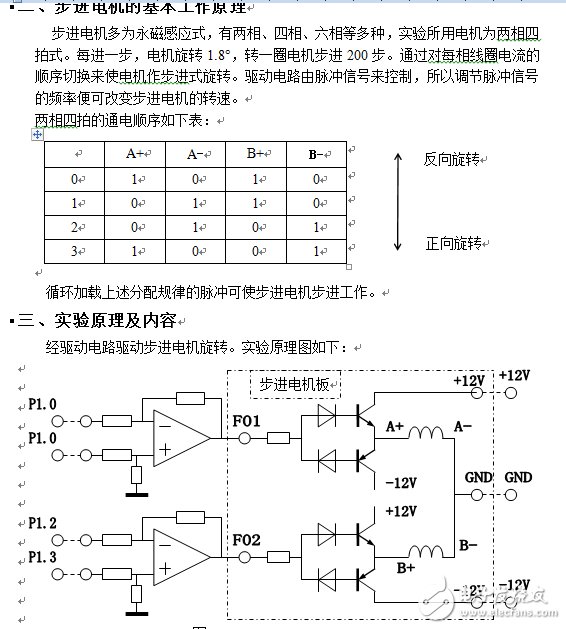
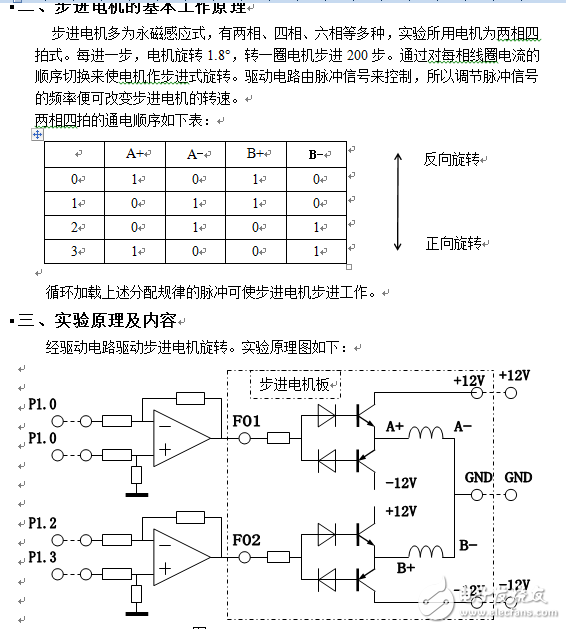
file:///C:\Users\dell\AppData\Roaming\Tencent\Users\2277121818\QQ\WinTemp\RichOle\JXI@GIE(N(_%S2`IA%ZR3U6.pngfile:///C:\Users\dell\AppData\Roaming\Tencent\Users\2277121818\QQ\WinTemp\RichOle\JXI@GIE(N(_%S2`IA%ZR3U6.png1、 连接电机板步进电机部分的电源线(±12V,GND)并按图9连线。各运算放大器的入端电阻取100KΩ,反馈电阻取510KΩ。
2、 运行“计算机控制技术”,打开“实验选择”菜单,选择“步进电机控制”实验。将步进电机拔至“0”点。
3、 在命令菜单上选择“参数设置”命令,设置旋转方向(1为正向,-1为反向)和终止位置。
4、 在命令菜单上选择“模式转换”命令,可进行坐标模式和圆盘模式的转换。
5、 在命令菜单上选择“运行N步”命令,步进电机以当前所在位置为起点,设置的终止位置为终点,按设置的方向旋转一定步数而停止。起动时速度由低至最高(200步/秒),停止时逐渐减速至零。
6、 在命令菜单上选择“连续运行”命令,步进电机以当前所在位置为起点,按设置的旋转方向旋转,起始速度为1步/秒,按加速键逐渐加速,按减速键逐渐减速,调速范围[1,200]之间,按“ESC”则停止运行。
7、 步进电机旋转过程中,计算机以红色字符将当前位置和即时速度显示在屏幕上。
五、实验报告1、 说明步进电机的工作原理。
2、 说明驱动步进电机应注意的问题。
3、 分析实际画出的曲线出现误差的原因。
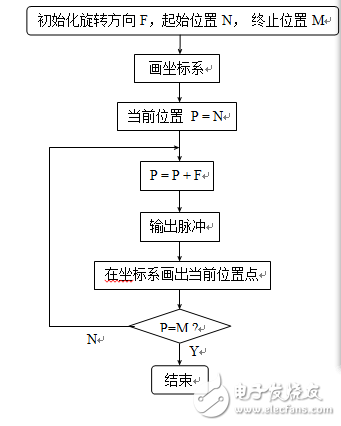
六、步进电机软件流程图