labview pid工具包的使用问题

安装NI光盘Tookit Software中的LabVIEW PID Control Tookit,即可在LabVIEW中生成该工具包。安装完成后打开一个新的VI,右击程序框图,在Functions Palette上选择Control Design&Simulation,即可看到PID工具包,该工具包由10个VI组成(图3)
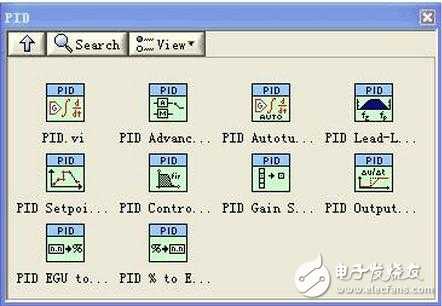
图3 PID工具包
利用PID.vi即可搭建一个简单的PID控制器,在该vi的输入端给入PID的3个参数值(PID gains),系统反馈值(process variable),实际期望值(setpoint)以及微分时间(dt),便能得到需要的输出值(output)。该vi还能控制输出值的范围(图4)
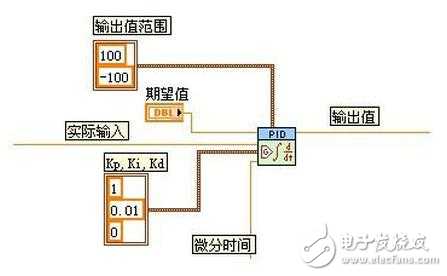
图4 PID.vi
PID Advanced.vi是为专家PID设计的vi,增加了一些高级的功能,如可以设定期望值的范围(setpoint range),手动控制(manual control),线性化(linearity)等功能。PID Autotuning.vi是为需要自整定的PID系统设计的,在给出一些基本要求后,具有自整定的功能(图5)。
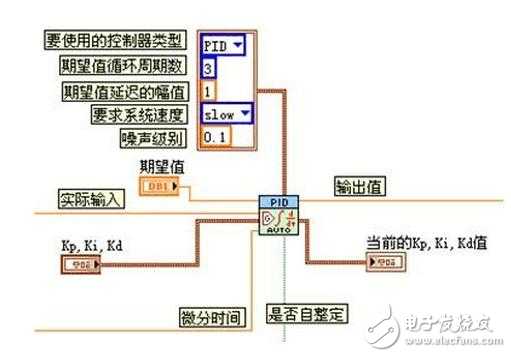
图5 PID Autotuning.vi
PID Lead/Lag.vi可以对PID控制器前端由系统反馈来的输入信号做动态补偿。PID Setpoint Profile.vi可以在期望值间断性变化时使其变得平滑。PID Control Input Filter.vi是一个五阶的低通滤波器,放在PID控制器的process variable前端,可以滤去小于采样率十分之一的输入值。PID Gain Schedule.vi可以写入几组增益参数,并给出条件,执行时当输入信号达到条件,便使用对应的一组参数给入到PID控制器的PID Gains上。PID Output Limiter.vi对PID控制器输出信号的变化速率进行控制,以保证外部接受控制信号部件的安全。PID EGU to %.vi和PID % to EGU.vi负责对实际数值和其在设定工程单元范围内占的百分比进行转换。
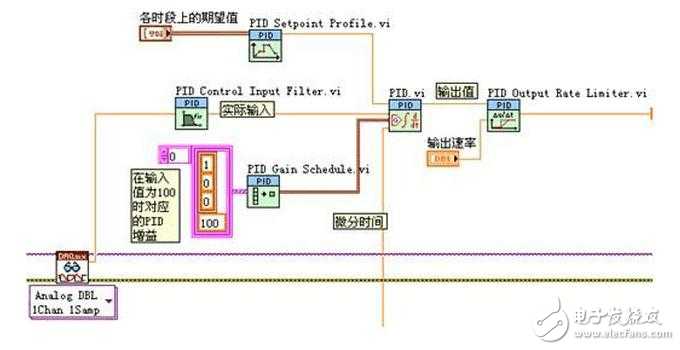
图6 构建PID控制系统
PID工具包提供的这10个VI,可以满足大多数场合的应用,根据不同的现场需求,使用不同的VI搭建PID控制器,十分方便(图6)。PID控制器输出的精准还和前端的输入信号是否精确密切相关,所以采集控制系统的前端输出而得到的系统反馈尤其重要。NI的DAQ数据采集卡不仅工作稳定,结合LabVIEW编程方便兼容性好,且种类很多,可满足工程师各类不同档次上的需求。相信在NI软硬件的配合下,能够使搭建PID控制系统变得更加方便快速顺利,起到事半功倍的效果。
以身相许就不用了。以后有啥好的资料好的问题欢迎来论坛分享啊!
谢谢一楼的解答,非常有帮助
灰常感谢一楼 啊啊