单脉冲雷达
时间:10-02
整理:3721RD
点击:
单脉冲雷达(monopulse radar)是一种精密跟踪雷达,其设计的初衷是为了克服圆锥扫描和顺序波束转换跟踪技术对回波幅度起伏和幅度干扰敏感,从而造成错误的目标角度跟踪误差的问题。这种技术最初叫同时多波束技术,它能同时提供对角误差敏感所需要的所有波束,在单个脉冲上同时比较各个波束的输出,从而可以回波幅度随时间变化的影响。后来采用单脉冲这个术语,指能够在单个脉冲上获得角误差信息的能力。单脉冲雷达通常有比幅单脉冲雷达和比相单脉冲雷达两大类。它有较高的测角精度、分辨率和数据率,但设备比较复杂。单脉冲雷达主要用于目标识别、靶场精密跟踪测量、弹道导弹预警和跟踪、导弹再入弹道测量、火箭和卫星跟踪、武器火力控制、炮位侦察、地形跟随、导航、地图测绘等。

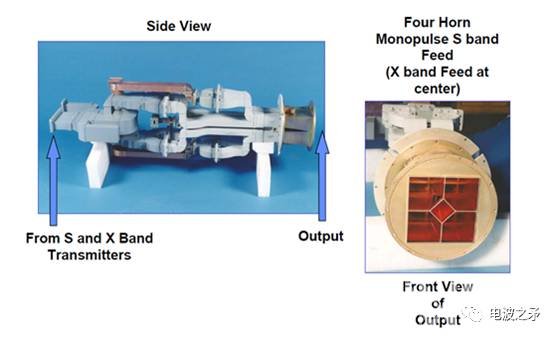
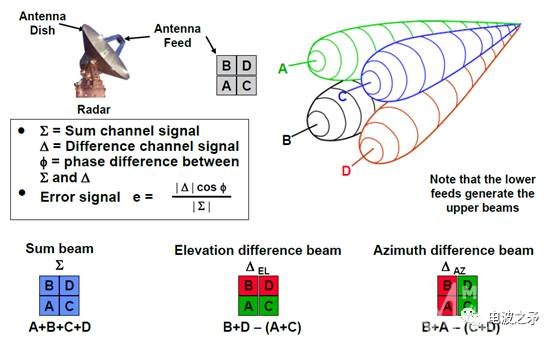 一个比幅单脉冲馈源设计成能检测“斑点”离开聚焦平面中心的任何横向位移。例如,一个采用四喇叭方形的单脉冲馈源,其中心放在焦点上。它是对称的,当“斑点”落在中心时四喇叭中的每一个喇叭收到的能量均相等。如果目标离开轴线,就会使“斑点”移动,于是在各喇叭中的能量就会不平衡。雷达通过比较在各个喇叭中激起的回波信号幅度来检测目标的位移。这是靠采用微波混合电路使两对喇叭的输出相减来完成的。只要目标离开轴线,即引起了不平衡,就会有敏感器件给出信号输出。
一个比幅单脉冲馈源设计成能检测“斑点”离开聚焦平面中心的任何横向位移。例如,一个采用四喇叭方形的单脉冲馈源,其中心放在焦点上。它是对称的,当“斑点”落在中心时四喇叭中的每一个喇叭收到的能量均相等。如果目标离开轴线,就会使“斑点”移动,于是在各喇叭中的能量就会不平衡。雷达通过比较在各个喇叭中激起的回波信号幅度来检测目标的位移。这是靠采用微波混合电路使两对喇叭的输出相减来完成的。只要目标离开轴线,即引起了不平衡,就会有敏感器件给出信号输出。
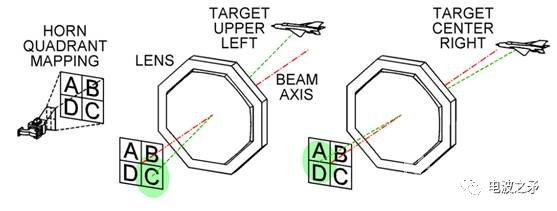 常规的四喇叭方形馈源所用的微波电路如下图所示,从右边一对输出中减去左边一对输出以检测方位角方向上的任何不平衡,同时从下面一对输出中减去上面一对输出以检测仰角方向上的任何不平衡。
常规的四喇叭方形馈源所用的微波电路如下图所示,从右边一对输出中减去左边一对输出以检测方位角方向上的任何不平衡,同时从下面一对输出中减去上面一对输出以检测仰角方向上的任何不平衡。
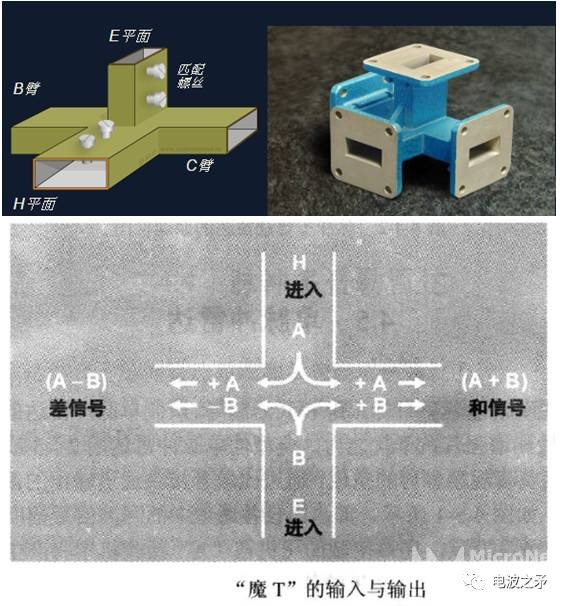
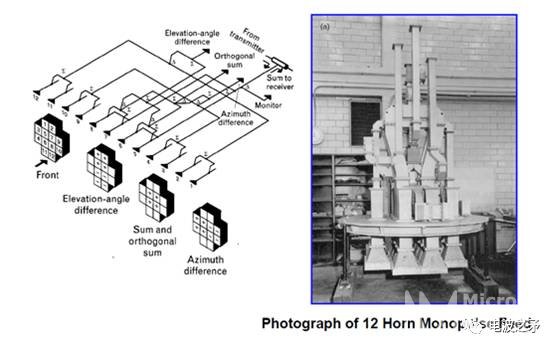
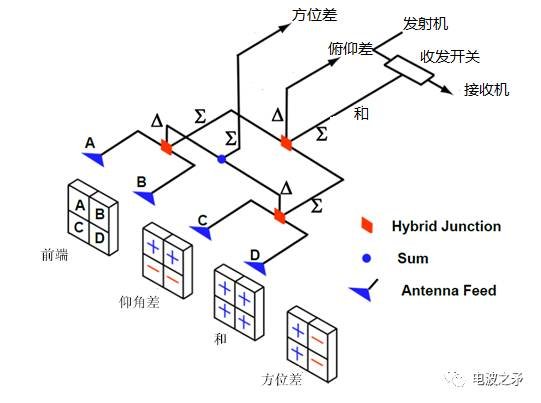 图中的比较器实现了馈源输出的加减,从而得到了单脉冲的和、差信号。这可以用混合T型或魔T波导器件实现。它们是四口器件,其基本形式的输入口和输出口在位置上是相互垂直的。现已开发出方便的“折叠”结构的魔T波导接头是非常紧凑的比较器组件。
图中的比较器实现了馈源输出的加减,从而得到了单脉冲的和、差信号。这可以用混合T型或魔T波导器件实现。它们是四口器件,其基本形式的输入口和输出口在位置上是相互垂直的。现已开发出方便的“折叠”结构的魔T波导接头是非常紧凑的比较器组件。
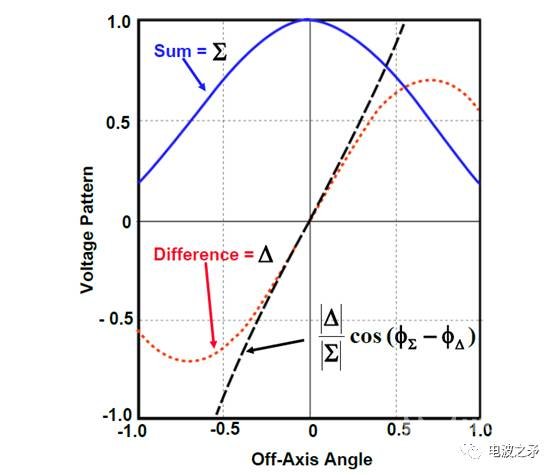
 相减器的输出称为差信号。当目标在轴线上时,差信号为零。当目标偏离轴线的位移增加时,差信号的幅度就会增加。当目标从中心的一边变到另一边时,差信号的相位改变180°。4个喇叭输出的总和提供一个参考信号,以便即使目标回波信号在大动态范围内变化时仍能得到稳定的角跟踪灵敏度(每度误差的电压伏数)。为了保持角跟踪环路增益的恒定以达到稳定的自动角跟踪,AGC是必要的。
相减器的输出称为差信号。当目标在轴线上时,差信号为零。当目标偏离轴线的位移增加时,差信号的幅度就会增加。当目标从中心的一边变到另一边时,差信号的相位改变180°。4个喇叭输出的总和提供一个参考信号,以便即使目标回波信号在大动态范围内变化时仍能得到稳定的角跟踪灵敏度(每度误差的电压伏数)。为了保持角跟踪环路增益的恒定以达到稳定的自动角跟踪,AGC是必要的。
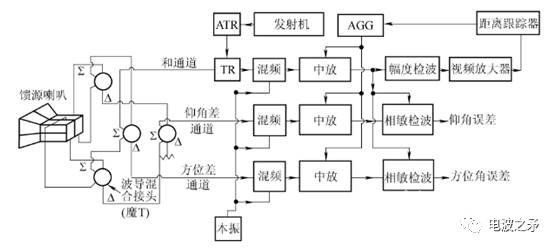
 典型的单脉冲雷达的框图如下。和信号、仰角差信号、方位差信号采用同一个本振各自变换成中频(IF),以便在中频上仍维持相对的相位关系。将中频和信号检波后输出,变成视频输出给测距机。测距机确定所需目标回波的到达时刻,并提供波门脉冲以使部分接收机只在所需期待目标的短暂时间内接通。将经过波门选通的视频用来产生正比于或||的AGC直流电压来控制三路中放通道增益。即使目标回波信号在很大的动态范围内变化,AGC通过控制增益或除以||也能使角跟踪灵敏度(每度误差的电压伏数)不变。为了稳定自动角跟踪,必须用AGC保持角跟踪环路的增益不变。
典型的单脉冲雷达的框图如下。和信号、仰角差信号、方位差信号采用同一个本振各自变换成中频(IF),以便在中频上仍维持相对的相位关系。将中频和信号检波后输出,变成视频输出给测距机。测距机确定所需目标回波的到达时刻,并提供波门脉冲以使部分接收机只在所需期待目标的短暂时间内接通。将经过波门选通的视频用来产生正比于或||的AGC直流电压来控制三路中放通道增益。即使目标回波信号在很大的动态范围内变化,AGC通过控制增益或除以||也能使角跟踪灵敏度(每度误差的电压伏数)不变。为了稳定自动角跟踪,必须用AGC保持角跟踪环路的增益不变。
 典型应用
典型应用
 单脉冲测角体制是一种典型的同时多波束测角方法,这种同时多波束的测角方法具有很强的抗干扰能力,如目标上的自卫式噪声干扰、转发式脉冲调幅干扰、逆增益应答式欺骗干扰都对单脉冲角度跟踪系统的工作影响很小,甚至没有影响。同时,受单脉冲测角体制的影响,这种测角体制本质上是跟踪目标回波信号的波前(等相位面),因此任何改变相位波前的因素,都会影响测角精度,这实际上为我们提供了针对单脉冲测角体制导引头干扰的可能途径——角度欺骗干扰,如交叉眼干扰。电波之矛
单脉冲测角体制是一种典型的同时多波束测角方法,这种同时多波束的测角方法具有很强的抗干扰能力,如目标上的自卫式噪声干扰、转发式脉冲调幅干扰、逆增益应答式欺骗干扰都对单脉冲角度跟踪系统的工作影响很小,甚至没有影响。同时,受单脉冲测角体制的影响,这种测角体制本质上是跟踪目标回波信号的波前(等相位面),因此任何改变相位波前的因素,都会影响测角精度,这实际上为我们提供了针对单脉冲测角体制导引头干扰的可能途径——角度欺骗干扰,如交叉眼干扰。电波之矛
 欢迎您的关注!
欢迎您的关注!
一个比幅单脉冲馈源设计成能检测“斑点”离开聚焦平面中心的任何横向位移。例如,一个采用四喇叭方形的单脉冲馈源,其中心放在焦点上。它是对称的,当“斑点”落在中心时四喇叭中的每一个喇叭收到的能量均相等。如果目标离开轴线,就会使“斑点”移动,于是在各喇叭中的能量就会不平衡。雷达通过比较在各个喇叭中激起的回波信号幅度来检测目标的位移。这是靠采用微波混合电路使两对喇叭的输出相减来完成的。只要目标离开轴线,即引起了不平衡,就会有敏感器件给出信号输出。常规的四喇叭方形馈源所用的微波电路如下图所示,从右边一对输出中减去左边一对输出以检测方位角方向上的任何不平衡,同时从下面一对输出中减去上面一对输出以检测仰角方向上的任何不平衡。图中的比较器实现了馈源输出的加减,从而得到了单脉冲的和、差信号。这可以用混合T型或魔T波导器件实现。它们是四口器件,其基本形式的输入口和输出口在位置上是相互垂直的。现已开发出方便的“折叠”结构的魔T波导接头是非常紧凑的比较器组件。 相减器的输出称为差信号。当目标在轴线上时,差信号为零。当目标偏离轴线的位移增加时,差信号的幅度就会增加。当目标从中心的一边变到另一边时,差信号的相位改变180°。4个喇叭输出的总和提供一个参考信号,以便即使目标回波信号在大动态范围内变化时仍能得到稳定的角跟踪灵敏度(每度误差的电压伏数)。为了保持角跟踪环路增益的恒定以达到稳定的自动角跟踪,AGC是必要的。 典型的单脉冲雷达的框图如下。和信号、仰角差信号、方位差信号采用同一个本振各自变换成中频(IF),以便在中频上仍维持相对的相位关系。将中频和信号检波后输出,变成视频输出给测距机。测距机确定所需目标回波的到达时刻,并提供波门脉冲以使部分接收机只在所需期待目标的短暂时间内接通。将经过波门选通的视频用来产生正比于或||的AGC直流电压来控制三路中放通道增益。即使目标回波信号在很大的动态范围内变化,AGC通过控制增益或除以||也能使角跟踪灵敏度(每度误差的电压伏数)不变。为了稳定自动角跟踪,必须用AGC保持角跟踪环路的增益不变。典型应用单脉冲测角体制是一种典型的同时多波束测角方法,这种同时多波束的测角方法具有很强的抗干扰能力,如目标上的自卫式噪声干扰、转发式脉冲调幅干扰、逆增益应答式欺骗干扰都对单脉冲角度跟踪系统的工作影响很小,甚至没有影响。同时,受单脉冲测角体制的影响,这种测角体制本质上是跟踪目标回波信号的波前(等相位面),因此任何改变相位波前的因素,都会影响测角精度,这实际上为我们提供了针对单脉冲测角体制导引头干扰的可能途径——角度欺骗干扰,如交叉眼干扰。电波之矛欢迎您的关注!