第三篇?Rico Board使用 hrt高精度时钟驱动舵机
时间:10-02
整理:3721RD
点击:
首先科普一下舵机驱动的要求:
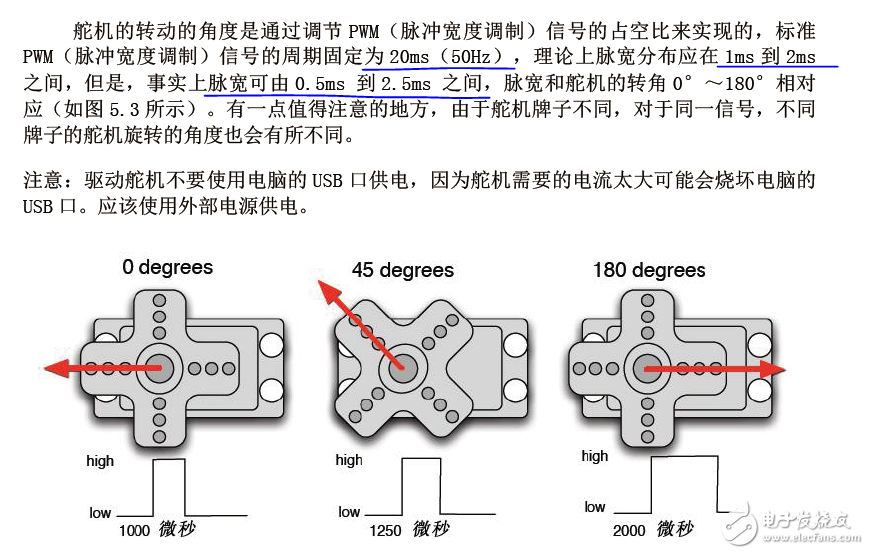
既然周期是20ms,脉宽处在0.5ms~2.5ms。所以,普通的内核定时器就不能满足要求了,就要用到高精度定时器。我主要参考的内容如下:
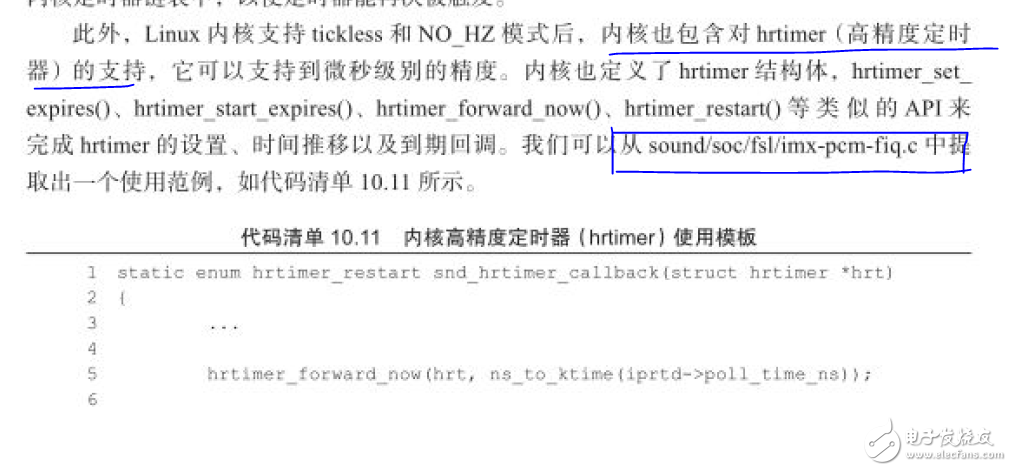
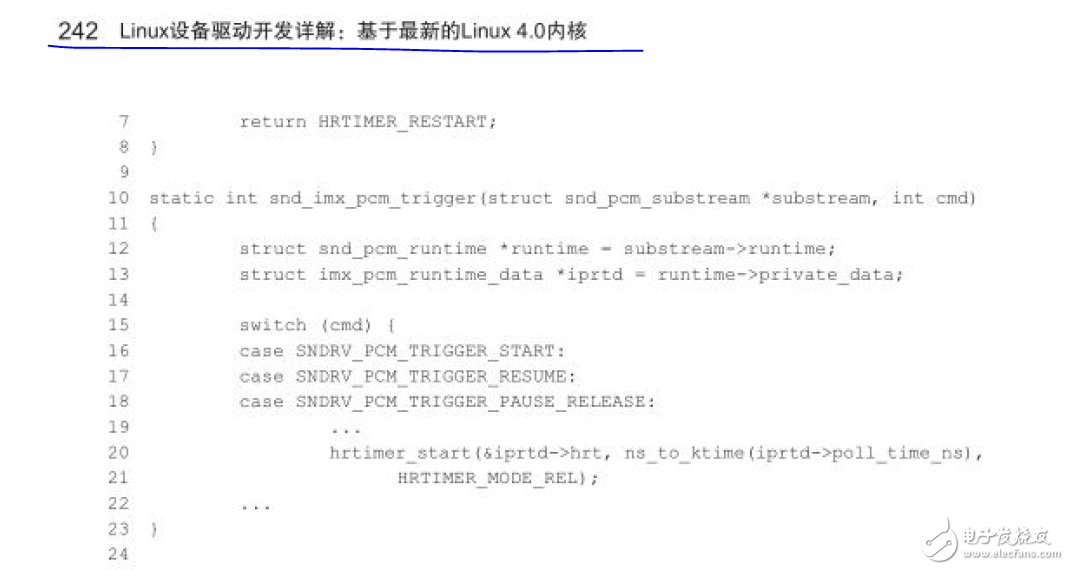
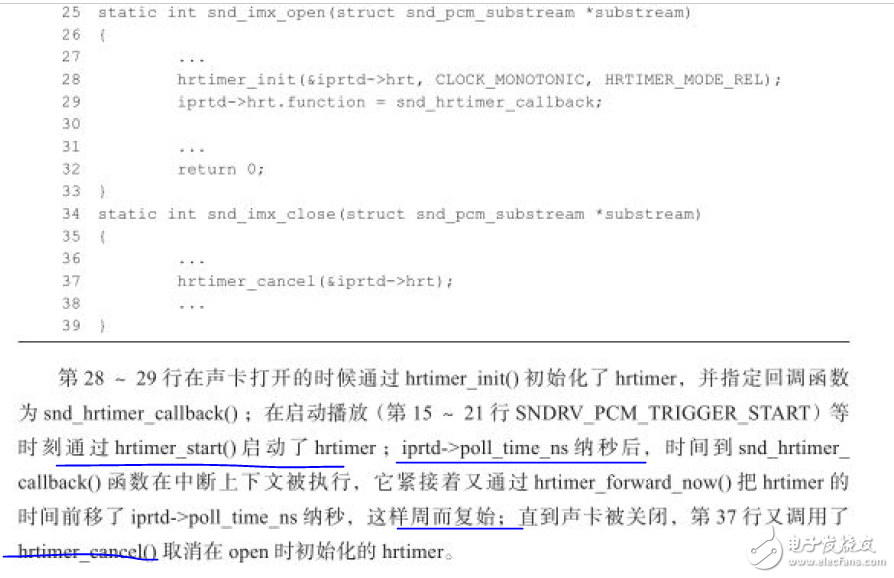
这都是摘自宋宝华的《Linux设备驱动开发详解基于最新的Linux4.0内核》。
我的代码如下:
- /**
- * [url=home.php?mod=space&uid=1455510]@file[/url] motor.c
- * [url=home.php?mod=space&uid=40524]@author[/url] yang yongsheng
- * @date 2016.11.2
- */
- #include
- #include
- #include
- #include // Required for the GPIO functions
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- #include
- #define NAME_LEN 16
- /*gpio5_8*/
- //#define MOTOR_GPIO_NUM 168
- /*gpio5_9*/
- #define LED_GPIO_NUM 169
- #define MOTOR_NUM 1
- #define MOTOR_NAME "rico_lan motor"
- #define MOTOR_MAJOR 0
- static int motor_major = MOTOR_MAJOR;
- static dev_t motor_dev_num;
- int motor_gpio[MOTOR_NUM] = {113};
- MODULE_LICENSE("GPL");
- MODULE_AUTHOR("yang yongsheng ");
- MODULE_VERSION("0.1");
- struct motor_dev{
- struct cdev cdev;
- int num;
- unsigned int pwm_value_us;
- struct hrtimer hrt;
- char name[NAME_LEN];
- bool pwm_state;
- } *motor_devp;
- struct class *motor_class;
- static enum hrtimer_restart motor_hrtimer_callback(struct hrtimer *hrt)
- {
- struct motor_dev *devp_tmp;
- devp_tmp = container_of(hrt, struct motor_dev, hrt);
- devp_tmp->pwm_state = !devp_tmp->pwm_state;
- gpio_set_value(devp_tmp->num, devp_tmp->pwm_state);
- if(devp_tmp->pwm_state == false)
- hrtimer_forward_now(hrt, ns_to_ktime((20000-devp_tmp->pwm_value_us)*1000));//T=20,000ns
- else if(devp_tmp->pwm_state == true)
- hrtimer_forward_now(hrt, ns_to_ktime((devp_tmp->pwm_value_us) * 1000));//T=20,000ns
- //printk(KERN_INFO "hrt time is %d",devp_tmp->pwm_value_us);
- return HRTIMER_RESTART;
- }
- int motor_open (struct inode *inode, struct file *filp)
- {
- struct motor_dev *devp_tmp;
- devp_tmp = container_of(inode->i_cdev, struct motor_dev, cdev);
- filp->private_data = devp_tmp;
- hrtimer_init(&devp_tmp->hrt, CLOCK_MONOTONIC, HRTIMER_MODE_REL);
- devp_tmp->hrt.function = motor_hrtimer_callback;
- gpio_set_value(devp_tmp->num, devp_tmp->pwm_state);
- hrtimer_start(&devp_tmp->hrt, ns_to_ktime(devp_tmp->pwm_value_us), HRTIMER_MODE_REL);
- printk(KERN_INFO "motor_open.\n");
- return 0;
- }
- int motor_release (struct inode *inode, struct file *filp)
- {
- struct motor_dev *devp_tmp;
- devp_tmp = filp->private_data;
- printk(KERN_INFO "motor_release and pwm_value_us is %d.\n", devp_tmp->pwm_value_us);
- return 0;
- }
- ssize_t motor_write (struct file *filp, const char __user *buf, size_t count, loff_t *ppos)
- {
- char pwm_value_tmp[8];
- struct motor_dev *motor_devp_tmp = filp->private_data;
- copy_from_user(pwm_value_tmp, buf, sizeof(buf));
- gpio_set_value(LED_GPIO_NUM , motor_devp_tmp->pwm_state);
- motor_devp_tmp->pwm_value_us = simple_strtoul(pwm_value_tmp, NULL, 10);
- if(motor_devp_tmp->pwm_value_us > 2500)
- motor_devp_tmp->pwm_value_us = 2500;
- else if(motor_devp_tmp->pwm_value_us pwm_value_us = 500;
- printk(KERN_INFO "pwm_value is %d.\n", motor_devp_tmp->pwm_value_us);
- printk(KERN_INFO "motor_write.\n");
- return count;
- }
- static struct file_operations motor_fops =
- {
- .owner = THIS_MODULE,
- .open = motor_open,
- .release = motor_release,
- .write = motor_write,
- };
- int motor_setup(struct motor_dev *devp, int min, int num)
- {
- int ret = 0;
- sprintf(devp->name, "motor%d", min);
- if(!gpio_is_valid(num))
- {
- printk(KERN_INFO "invalid motor%d_gpio_num:%d.\n",min, num);
- return -ENODEV;
- }
- else
- {
- gpio_request(num, "sysfs");
- gpio_direction_output(num, false);
- gpio_export(num, false); /*cause GPIO_NUM to appear in /sys/class/gpio*/
- }
- devp->num = num;
- devp->pwm_value_us = 1500;//500~2500 us
- devp->pwm_state = true;
- devp->cdev.owner = THIS_MODULE;
- cdev_init(&devp->cdev, &motor_fops);
- ret = cdev_add(&devp->cdev, MKDEV(motor_major, min), 1);
- if(ret)
- {
- printk(KERN_INFO "error %d adding motor%d.\n", ret, min);
- }
- else
- {
- device_create(motor_class, NULL, MKDEV(motor_major, min), NULL,devp->name);
- }
- return 0;
- }
- int __init motor_init(void)
- {
- int ret,i;
- printk(KERN_INFO "motor_init begin.\n");
- if(!gpio_is_valid(LED_GPIO_NUM))
- {
- printk(KERN_INFO "invalid LED_GPIO_NUM:%d.\n",LED_GPIO_NUM);
- return -ENODEV;
- }
- motor_devp = kzalloc(sizeof(struct motor_dev) * MOTOR_NUM, GFP_KERNEL);
- if(IS_ERR(motor_devp))
- {
- printk(KERN_INFO "no space for motor_dev.\n");
- return -ENOMEM;
- }
- motor_class = class_create(THIS_MODULE, MOTOR_NAME);
- if(motor_major == 0)
- {
- ret = alloc_chrdev_region(&motor_dev_num, 0, MOTOR_NUM, MOTOR_NAME);
- motor_major = MAJOR(motor_dev_num);
- }
- else
- {
- motor_dev_num = MKDEV(motor_major, 0);
- ret = register_chrdev_region(motor_dev_num, MOTOR_NUM, MOTOR_NAME);
- }
- if(ret hrt);
- gpio_unexport((motor_devp+i)->num);
- gpio_free((motor_devp+i)->num);
- device_destroy(motor_class,MKDEV(motor_major,i));
- cdev_del(&(motor_devp+i)->cdev);
- unregister_chrdev_region(MKDEV(motor_major, i), 1);
- kfree(motor_devp+i);
- }
- gpio_unexport(LED_GPIO_NUM);
- gpio_free(LED_GPIO_NUM);
- class_destroy(motor_class);
-
- printk(KERN_INFO "motor_exit finished.\n");
- }
- module_init(motor_init);
- module_exit(motor_exit);
实现的内容:
往字符设备/dev/motor0 写入脉宽的时间(500ns~2500ns)可以自动修正超界的脉宽值。可以控制舵机旋转角度在(0~180)。
驱动舵机的GPIO为GPIO3_17 (也就是113号引脚,程序里面有体现)。
现场视频(用户程序控制输出脉宽每1s,增加50us),已经上传到了优酷:
1。示波器显示,
http://v.youku.com/v_show/id_XMTc4NTUyMTM4NA==.html
2。现场舵机转动:
http://v.youku.com/v_show/id_XMTc4NTUyMjIzNg==.html
下面记录下我的整个实验过程:
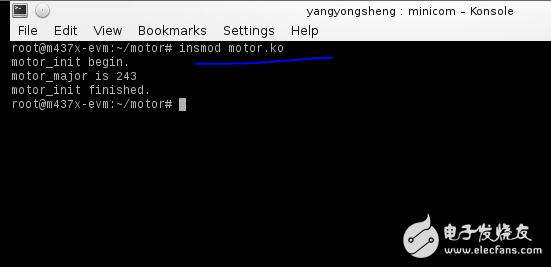
1.安装编译好的模块,自动创建设备节点/dev/motor0
2.查看默认输出的脉宽1500ns:
关键代码如下:

查看波形,脉宽1.52ms:

周期20ms:

3.命令行下,手动更改脉宽到2000ns:
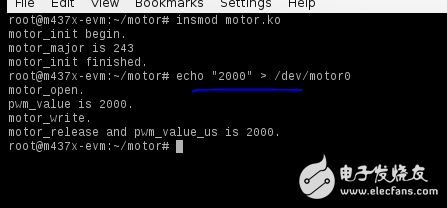
脉宽显示2ms

4.放上几张现场图片,挺乱的,太懒了我,东西都堆在一起了。



这次主要学到了两点:
(1)module_init和module_exit用大写时就出错了,要记得用小写。
(2)知道了高精度定时器hrt的使用方法。
这个 ,大材小用了吧,即使RicoBoard能输出超精密的PWM波,舵机也不见得能分辨的过来啊
那还能有什么好办法实现啊?