+ 双目摄像头校准
时间:10-02
整理:3721RD
点击:
双面景深视觉系统和单片视觉视觉系统很有大的区别,单片视觉系统无法得到精确的距离信息,就像人一下样如果使用一只眼睛看物体的话将失去距离感,目前的单目视觉系统得到的景深只是一个比例值,这是因为,双面视觉系统的两个摄像头的距离是已知的。另外双面使用的是块的特制匹配可以生成致密的景深图,而单目使用是两张图的特征点计算出距离比例,获得的是稀疏的景深图。由于双目视觉系统需要匹配是整幅图所有像素的对应关系所有双面视觉系统的计算量非常的庞大,而单片计算量相比而言小很多。
双目视觉系统的计算两这个庞大,如果使用右边每个像素到左边的图像中一个个搜索匹配的点,那么这样的系统计算量大的惊人,所有可以将左右两个摄像头的图像校准的一个平面上,使用对极几何只在行的方向上搜索,也即是说右边像素点所在的行和左边相同的行是对应的,这个像素找特征点的时候只要在左边的相同行上找就可以了,计算两大幅降低。实际摄像头在安装和镜头畸变等原因,左右两个摄像头不再一个平面而且出现了旋转。所以要使用对极几何的前提就是需要校准图像。
开发平台:firefly RK3399
摄像头硬件:自制双面摄像头
棋盘格规格:6×4
棋盘格尺寸:3.7cm×3.7cm
图像尺寸:640×480


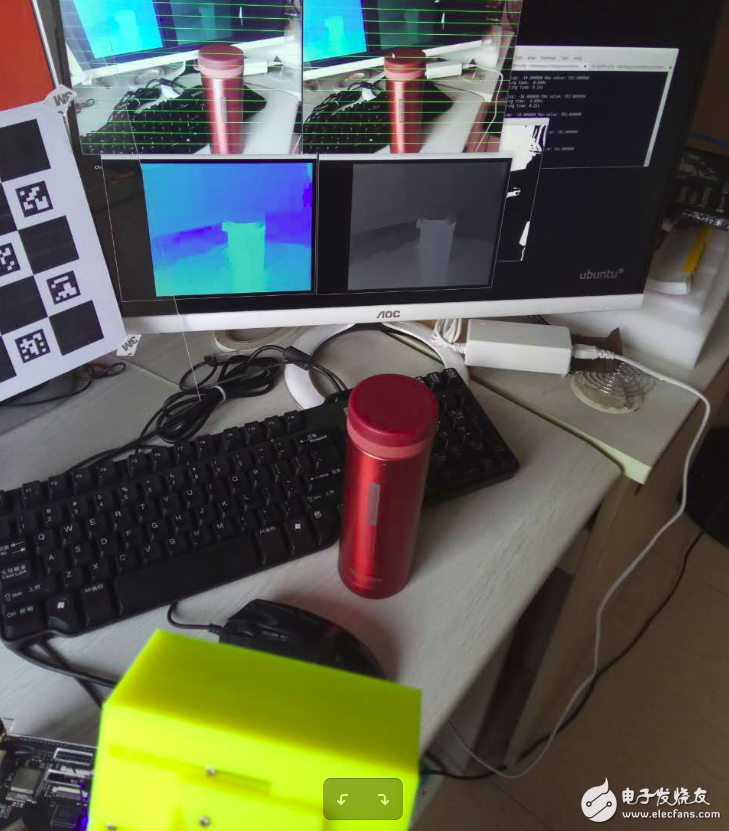
小编你景深算法跑起来如何?多少帧,我项目想用arm跑景深加物体识别,想看看这款开发板可不可行。
对,是做了一点测试;
目前可以达到10帧左右