+ 目前已经量产的stereo camera
时间:10-02
整理:3721RD
点击:
目前景深相机有很多已经成熟案例,技术实现方式只要有:TOF,双摄像头的视差,结构光
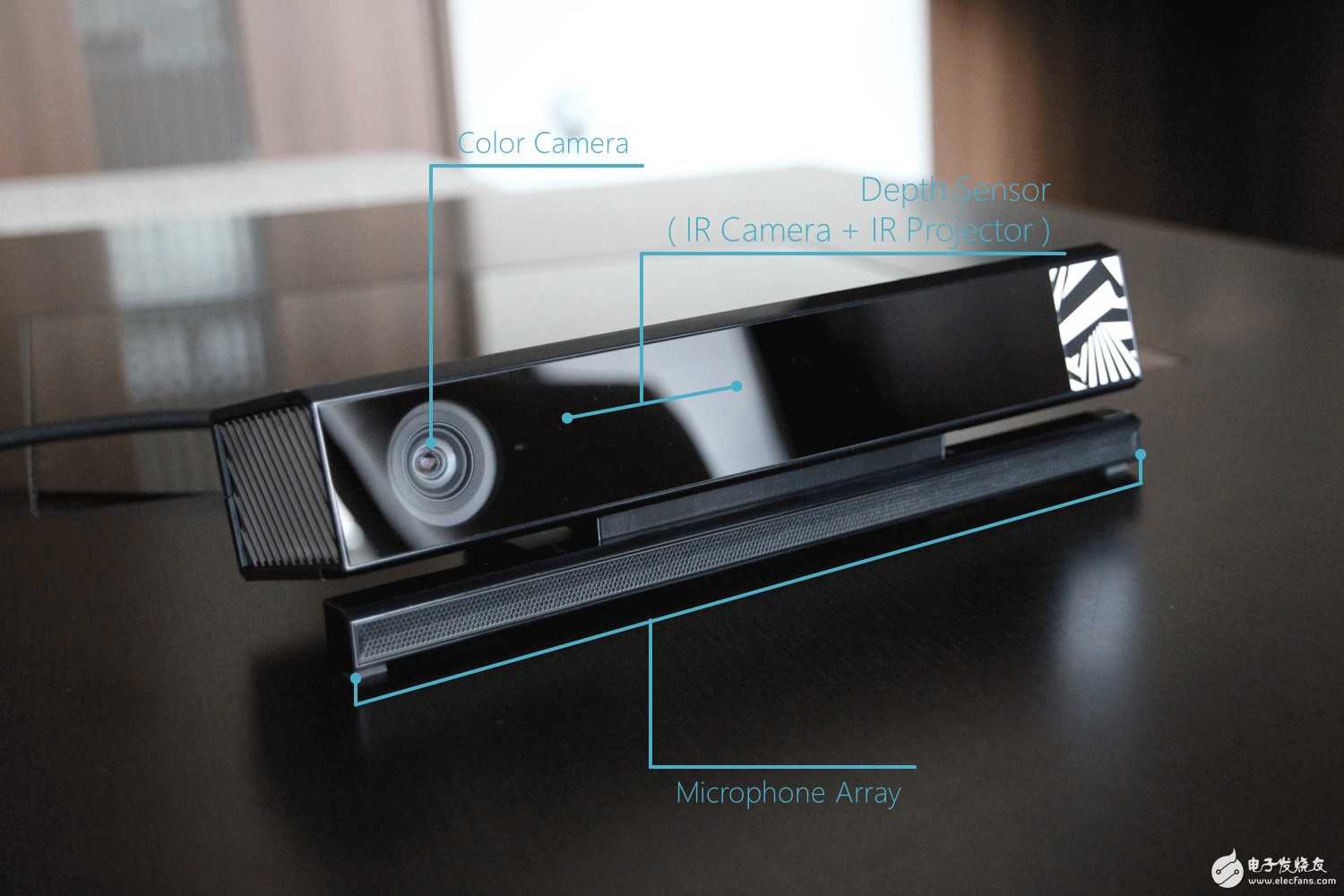
案例1:微软的kinect,这款产品开始只是作为XBOX的配件,目前已经更新迭代了两个版本,最新的版本使用的就是TOF的技术,TOF是Time of flight缩写,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。
参数:

案例2:intel的realsense,目前容易买到的有R200和F200,者两款产品使用的技术大体相同,但是应用分成不同的场景,使用了双目和TOF技术结合的技术。红外projector投射静态的散斑,两个红外相机拍摄两张红外的图片,再通过这个两张图片产生的视察计算出景深,生成景深图。

Intel的RealSense R200(参数规格:分辨率:1080p,深度有效距离:0.51-4,USB3.0)
案例3:ZED使用的是双摄像头,可以探测的距离可以达到20M,分辨率可以到2.2k 15FPS,720p可以达到60FPS

上面这些方案使用TOF和结构光的硬件制作的难度比较大,比如TOF的散斑需要是特制一个块特殊结果的镜片,这个需要定制,个人DIY爱好真做这个还是比较有门槛的,所以我使用单纯的双摄像头的方案,但是每种方案到各自的挑战,这一周在加工我自己的摄像头模块,所以具体进展要等硬件出来。
案例1:微软的kinect,这款产品开始只是作为XBOX的配件,目前已经更新迭代了两个版本,最新的版本使用的就是TOF的技术,TOF是Time of flight缩写,是通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测光脉冲的飞行(往返)时间来得到目标物距离。
参数:
案例2:intel的realsense,目前容易买到的有R200和F200,者两款产品使用的技术大体相同,但是应用分成不同的场景,使用了双目和TOF技术结合的技术。红外projector投射静态的散斑,两个红外相机拍摄两张红外的图片,再通过这个两张图片产生的视察计算出景深,生成景深图。
Intel的RealSense R200(参数规格:分辨率:1080p,深度有效距离:0.51-4,USB3.0)
案例3:ZED使用的是双摄像头,可以探测的距离可以达到20M,分辨率可以到2.2k 15FPS,720p可以达到60FPS
上面这些方案使用TOF和结构光的硬件制作的难度比较大,比如TOF的散斑需要是特制一个块特殊结果的镜片,这个需要定制,个人DIY爱好真做这个还是比较有门槛的,所以我使用单纯的双摄像头的方案,但是每种方案到各自的挑战,这一周在加工我自己的摄像头模块,所以具体进展要等硬件出来。
讲道理你这什么也没讲啊...
你可以拿他跑下三维重建和slam看下吃不吃力
试下pcl点云何八叉树建图之类的
slam目前没打算,后续会讲在这个板子上跑双目景深算法
这些照片都是网上的吧