车模已到,开始试车
时间:10-02
整理:3721RD
点击:
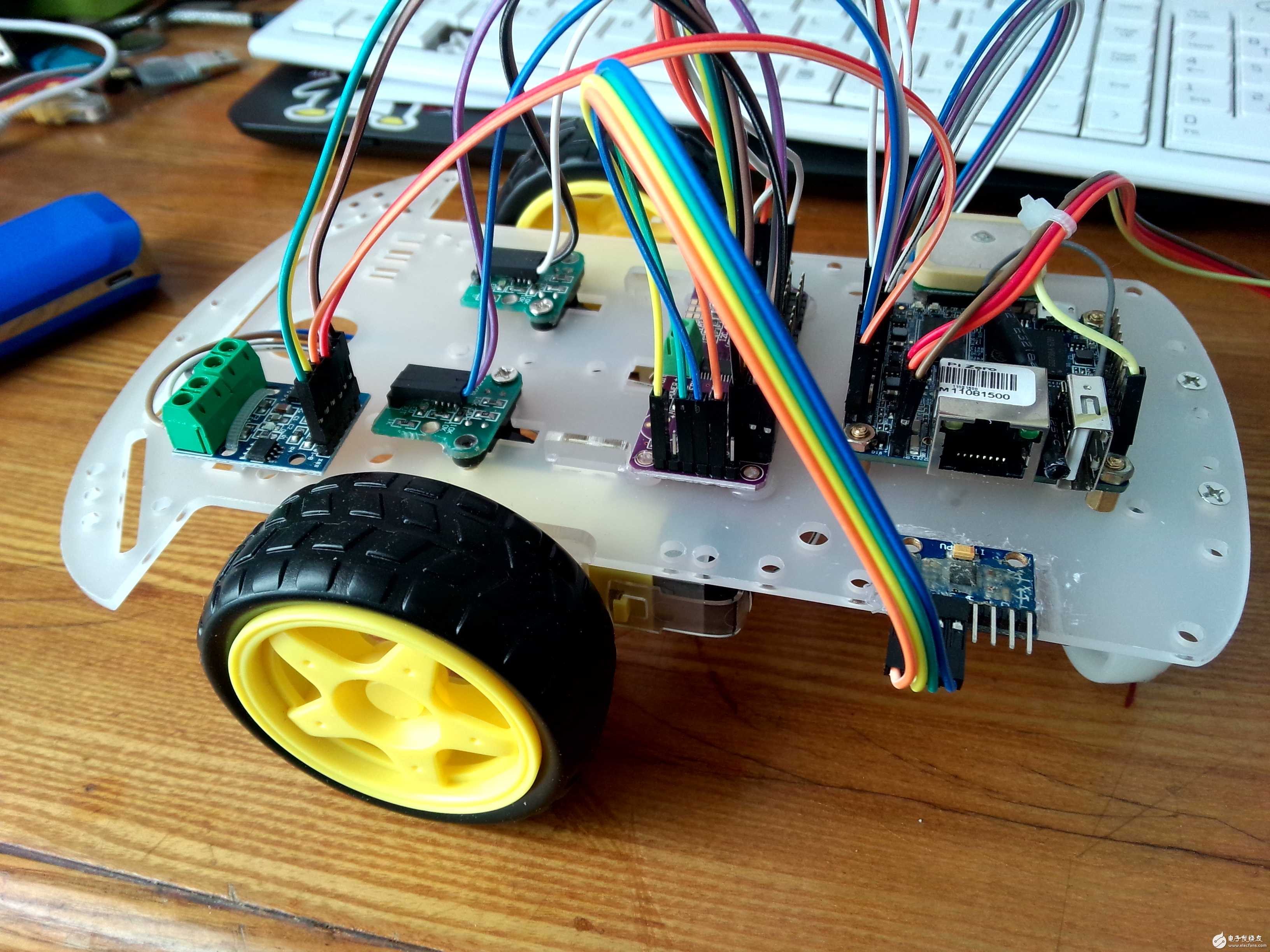
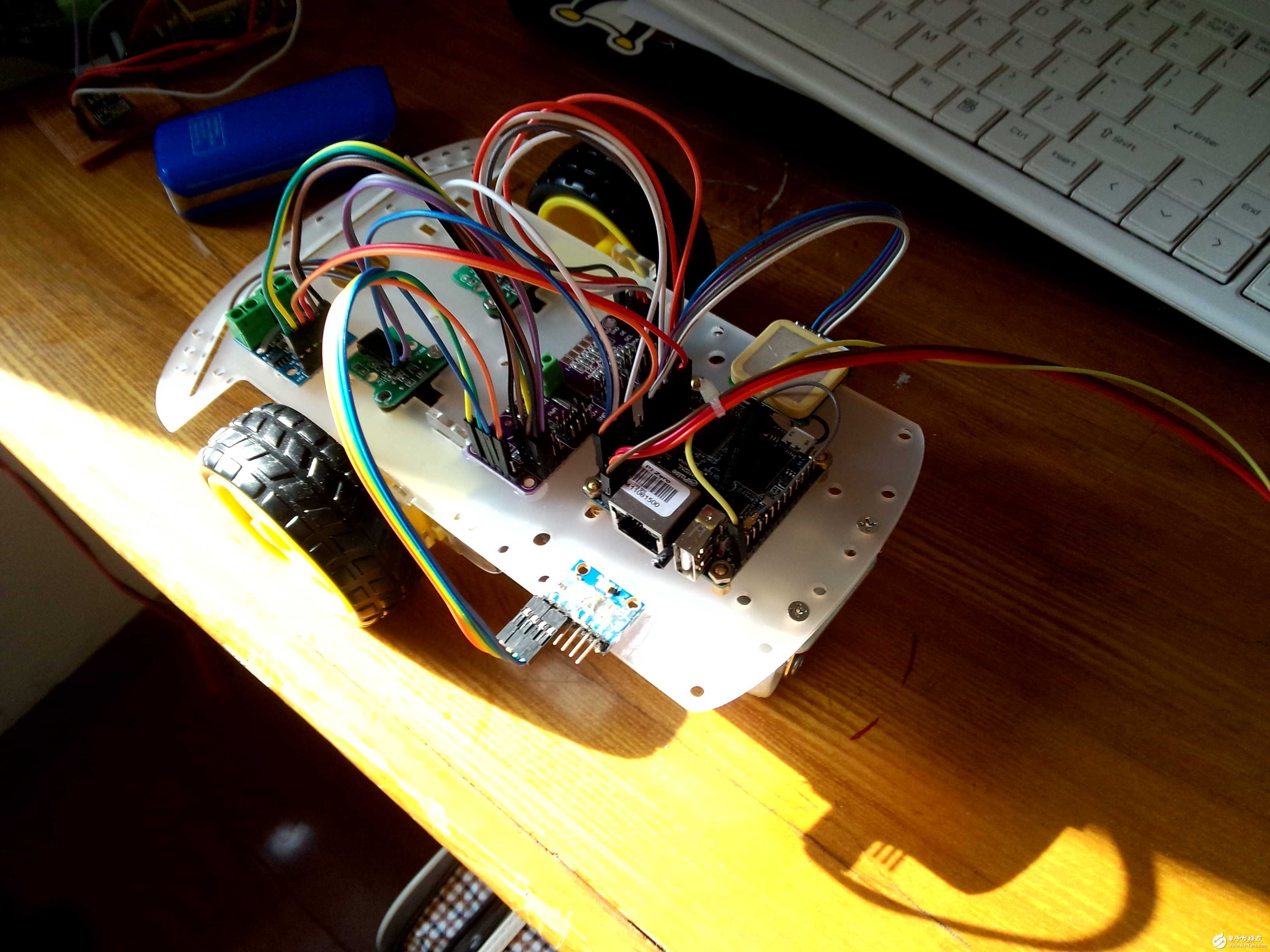
刚买的车模到了,可以开始进行设计了,整车使用的是L9110电机驱动、两个编码器、MPU6050姿态传感器、GPS模块、PWM输出模块以及核心板OrangePiZero,见图:

下一步进行试车。
下一步进行试车。

这个有相关软件资料分享吗
平衡车吗
这个多少钱啊。
软件才开始做,等弄完了会开源的,希望大神不要嫌弃我的程序啊
不是,两个轮子加一个万向轮,这个板子做平衡车太费劲,linux实时性不行。
车子20 pwm模块10块 编码器两个5块 GPS模块和MPU6050是现有的 我花了一共30左右
玩的可以
不会的 我在一个论坛可以兑换一辆这样的小车 可惜软件不会 想借鉴一下你的
这个可以啊,不错啊,等着看你的结果了
不错不错,值得学习
用orange pi是要上系统?
不然要裸奔?
那我就期待你的上系统控制的小车
做的得不到多多指教啊,linux不太熟。
我想问一下,小编是怎么控制pi的gpio的?
你可以使用wiringpi库,也可以使用我上传的库,可以直接控制IO口。