Modbus库开发笔记之五:Modbus RTU Slave开发
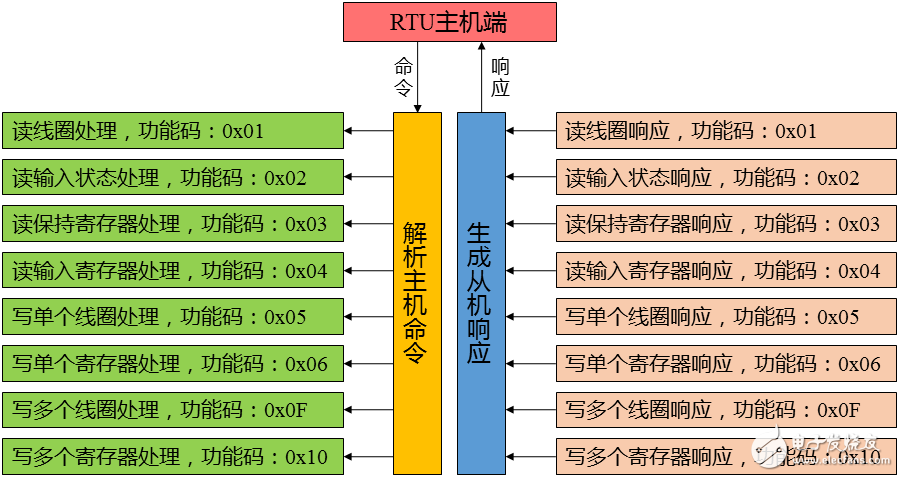
Modbus在串行链路上分为Slave和Master,这一节我们就来开发Slave。对于Modbus RTU从站来说,需要实现的功能其实与Modbus TCP的服务器端是一样的。其操作过程也是一样的。首先接收到主站的访问命令,对该命令报文进行解析,这里我们也只是实现前面提到的8种功能码。其次我们根据解析的结果进行对应的操作,具体的软件访问结构如下:
file:///C:/Users/FLOTA_~1/AppData/Local/Temp/msohtmlclip1/01/clip_image002.png
从上图中不难发现实际是3步:
第1步、接到命令后先解析。解析的方式与前面几节中的类式。
第2步、根据解析结果进行操作。包括更具命令修改或者获取变量的值。
第3步、生成响应并返回给主机。
1、解析主机命令
从机在接收到主机的命令报文后,对其进行解析,我们暂且支持上图所示的8种功能码。
/*解析接收到的信息,并返回合成的回复信息和信息的字节长度,通过回调函数*/
uint16_t ParsingMasterAccessCommand(uint8_t*receivedMessage,uint8_t *respondBytes,uint16_t rxLength)
该函数接收接受到的报文,并生成响应信息报文,返回值是响应报文的长度。在开发应用是将接收到的报文发送个该函数,并将生成的响应信息返回个客户端就可以了。
2、结果操作
解析之后无论是读命令还是写命令都需要进行相应的操作。我们根据不同的功能码封装不同的操作:
/*处理读线圈状态命令*/
static uint16_tHandleReadCoilStatusCommand(uint16_t startAddress,uint16_t quantity,uint8_t*receivedMessage,uint8_t *respondBytes)
/*处理读输入状态命令*/
static uint16_t HandleReadInputStatusCommand(uint16_tstartAddress,uint16_t quantity,uint8_t *receivedMessage,uint8_t *respondBytes)
/*处理读保持寄存器命令*/
static uint16_tHandleReadHoldingRegisterCommand(uint16_t startAddress,uint16_tquantity,uint8_t *receivedMessage,uint8_t *respondBytes)
/*处理读输入寄存器命令*/
static uint16_tHandleReadInputRegisterCommand(uint16_t startAddress,uint16_t quantity,uint8_t*receivedMessage,uint8_t *respondBytes)
/*处理写单个线圈命令*/
static uint16_tHandleWriteSingleCoilCommand(uint16_t coilAddress,uint16_t coilValue,uint8_t *receivedMessage,uint8_t*respondBytes)
/*处理写单个寄存器命令*/
static uint16_tHandleWriteSingleRegisterCommand(uint16_t registerAddress,uint16_tregisterValue,uint8_t *receivedMessage,uint8_t *respondBytes)
/*处理写多个线圈状态*/
static uint16_t HandleWriteMultipleCoilCommand(uint16_tstartAddress,uint16_t quantity,uint8_t *receivedMessage,uint8_t *respondBytes)
/*处理写多个寄存器状态*/
static uint16_tHandleWriteMultipleRegisterCommand(uint16_t startAddress,uint16_tquantity,uint8_t *receivedMessage,uint8_t *respondBytes)
同样我们也是定义一个函数指针数组来实现这8个函数的调用:
uint16_t(*HandleMasterCommand[])(uint16_t,uint16_t,uint8_t *,uint8_t*)={HandleReadCoilStatusCommand,
HandleReadInputStatusCommand,
HandleReadHoldingRegisterCommand,
HandleReadInputRegisterCommand,
HandleWriteSingleCoilCommand,
HandleWriteSingleRegisterCommand,
HandleWriteMultipleCoilCommand,
HandleWriteMultipleRegisterCommand};
3、生成从机响应
处理完还需要生成从机的相应信息,无论是读操作命令还是写操作命令,我们均在对应的功能码处理时生成响应报文。这么一来在开发应用时,只需要调用解析函数据可以实现全部的功能了。
感谢小编分享 看一下