高性能单片机车载惯性和GPS组合导航模块
一 传统车载GPS导航的痛点
目前车载导航已经获得了广泛应用,空旷环境的环境下,导航定位问题已经得到很好的解决。但是由于GPS导航的技术缺陷,在树荫下、高楼群、高架、隧道、地下停车场等环境复杂的场合都无法提供准确的定位信息。
由此可见,基于惯性和卫星的组合导航系统应用和普及势在必行!
二 组合导航的市场需求
(1)共享汽车
共享单车的出现,标志着中国已经进入共享经济,随即出现了共享汽车,而且已经在北上广深等地进行推广。但是有很多问题,比如客户无法尽快找到下单的汽车进行投诉,公司无法尽快找到汽车进行充电等业务,单纯的靠卫星定位已经无法很好的解决这一问题。
(2)智能公交系统
在北上广深等一线大城市,交通拥堵是常见问题。近两年推出的智能公交系统可以很好的改善这个痛点。但是,大城市交通环境复杂,智能公交的导航定位不精准,对于公交车的自动报站等业务带来较大的困扰!
(3)智能驾考
中国每年有上千万人参加驾照考试,但是,科目三都是城市环境中进行,各种遮挡造成了卫星定位的误差,所以,组合导航系统将会在驾考市场中获得巨大推广。
三 解决方案
针对传统车载GPS导航的痛点,深圳天工测控推出了基于惯性和卫星导航的高性能组合导航模块SKM-4DU。

SKM-4DU是一款高性能车载组合导航模块,同时支持北斗和GPS的卫星接收机芯片、三轴陀螺仪、三轴加速度等。
通过在线的自适应组合导航算法,SKM-4DU提供实时高精度的车辆定位、测速和测姿信息,在GNSS系统的信号精度降低甚至丢失卫星信号时,不借助里程计信息,SKM-4DU利用纯惯性导航技术,也可在较长时间内单独对汽车载体进行高精度定位、测速和测姿。
四 典型应用
◆车辆高精度导航
◆公交车智能交通
◆车辆远程监控
五 模块优势
◆消除陀螺漂移获高精度姿态航向信息
◆消除震动加速度获高精度速度信息
◆零速修正算法可防止导航数据漂移
◆基于自适应的扩展卡尔曼滤波算法
◆识别并隔离有较大误差的GNSS数据
◆利用纯惯性导航实现高精度定位
◆组合导航和纯惯导航技术自主切换
六 产品特征
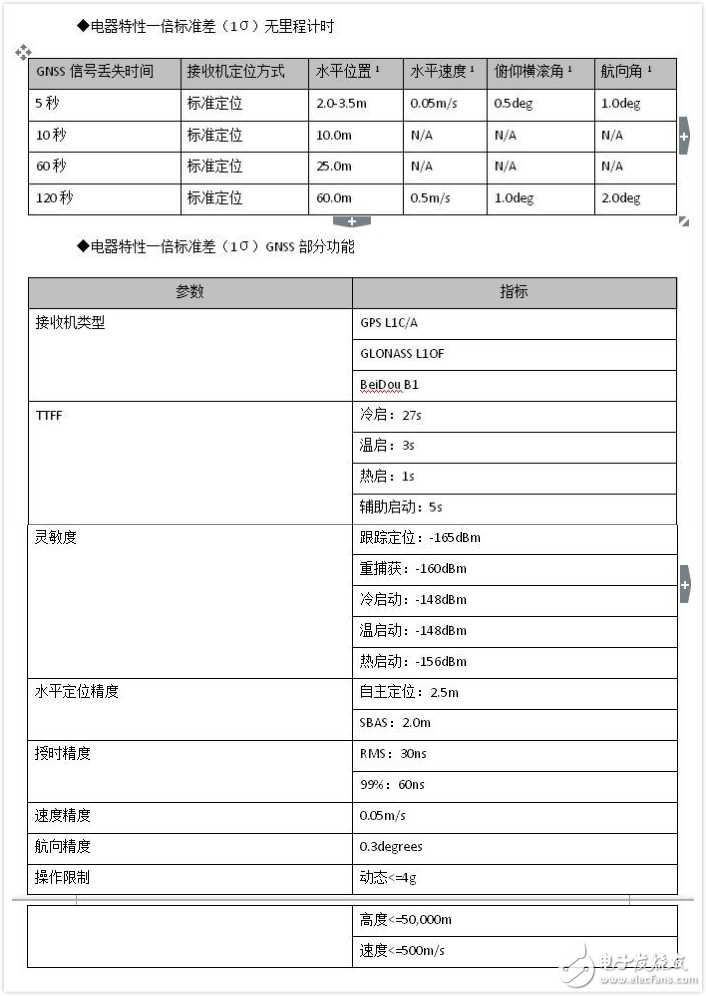
(1)电气特性

(2)性能指标
七 性能实测
下面一组图片是测试人员携带组合导航模块SKM-4DU的路测图。
(1)地下车库路测图。

在深圳北地下车库时,普通的车载导航是接不到卫星信号的,无法显示车辆的运动轨迹,如果您使用的是组合导航模块SKM-4DU,则会显示清晰的轨迹,无需担心爱车在地下车库收不到卫星信号。
(2)开山隧道路测图

深圳的塘朗山隧道

深圳的福龙山隧道
如图所示,白色的轨迹为普通车载导航模块记录的车辆运动轨迹,因为卫星信号较弱或接收不到,在隧道入口和出口以直线相连,与实际的运动轨迹偏差较大;深蓝色轨迹为使用组合导航模块SKM-4DU记录的车辆行驶轨迹,可以看出其真实而精确地记录了车子从进入隧道到离开隧道的运动轨迹,和真实路径精确吻合!
天工测控(SKYLAB)在无线模块的领域做了有十五年之久,有丰富的软硬件开发经验的技术团队。SKYLAB能提供系列工业级高品质GPS、BDS、GLONASS、GALILEO等GNSS导航定位模块、WIFI模块、蓝牙模块、及室内定位解决方案。
更多请:
百度一下 天工测控
在阿里巴巴搜天工测控选购
电询 8340 8210
QQ好:233 943 6443