ARM的启动分析
- STARTUP
1 ARM的启动
一般的嵌入式系统在主程序执行之前都需要执行一些初始化的过程以创造嵌入式程序运行的环境,尤其是一些高级的嵌入式系统,由于核心芯片使用内存映射、内存保护等机制以及编程使用高级语言C,C++甚至JAVA语言,都需要先创建一个适合程序运行的硬件环境,然后初始化或者配置或者剪裁run-time library, 这些工作都必须在主程序运行前完成,所以一个startup程序或者程序组对于一个嵌入式系统来说是非常重要的。要编写startup程序,需要对编译器、链接器和汇编器的细节有一定的了解,同时对ARM芯片硬件本身的地址分配以及memory mapping机制也需要有一些了解。
2 ARM 程序的工作过程
首先由各种source file经过编译产生object文件,然后object文件经过链接生成Image文件,然后通过ICE的方法,根据描述文件的指定下载到目标板上的固态存储器指定地址当中,比如flash,EEPROM, ROM等等。在程序执行之前,根据某些描述文件,将需要读写数据的部分读出放入动态存储器比如RAM当中,然后程序从ROM开始执行。或者有时为了提高程序的运行速度,也可以将所有的程序(有一些root的部分除外,以后会提及)通过一个描述文件放入指定的RAM当中,然后程序从RAM开始执行,但是这样会耗费大量的动态存储器,所以大部分程序会取折中的方法,将需要快速运行的部分和要读写的部分放入RAM中(一般读固态存储器的过程和动态存储器的过程是一样的,但是写就不同了,所以读写的部分一定要放到RAM中),而只读的部分和对速度要求不是那么高的部分放入固态存储器。同时ARM结构的异常向量表规定放在地址为0x00000000开始的地址空间上,而一般的CPU为了提高异常相应速度,会将这个向量段remap到其他的RAM当中,所以在描述文件当中必须精确指定异常向量跳转程序的地址到remap的地方。在application程序执行前,还需要由一些文件描述application程序执行的环境。比如系统工作时钟,总线频率。现在一般嵌入式编程语言为C,C++等。如果在使用它们的时候使用的runtime-library,那么在程序执行前还需要为这些库函数初始化heap。然后ARM可能工作在不同的模式,还需要为不同的工作模式设置stack。这样,描述链接地址的文件,以及在application运行前所有的初始化程序就是startup程序组
3 STARTUP分类
这样,将startup程序所完成的功能分类。一类是链接地址描述,一类是各种初始化的程序。根据不同的应用,描述文件和初始化程序的内容以及结构和复杂程度都会不同。但是基本上,它们都必须实现以下功能。
3.1 描述文件实现功能
描述文件可以是链接命令行上简单的几个字符,也可以是一个非常复杂的文件,但是它必须完成如下功能:
; 指定程序下载的地址
; 指定程序执行的地址
3.2 初始化程序实现的功能
初始化程序根据不同的应用,其结构和复杂度也不同,但是它必须完成如下基本功能:
; 异常向量初始化
; 内存环境初始化
; 其他硬件环境初始化
基于ARM的芯片多数为复杂的片上系统,这种复杂系统里的多数硬件模块都是可配置的,需要由软件来设置其需要的工作状态。因此在用户的应用程序之前,需要由专门的一段代码来完成对系统的初始化。由于这类代码直接面对处理器内核和硬件控制器进行编程,一般都是用汇编语言。一般通用的内容包括:
中断向量表
初始化存储器系统
初始化堆栈
初始化有特殊要求的断口,设备
初始化用户程序执行环境
改变处理器模式
呼叫主应用程序
1. 中断向量表
ARM要求中断向量表必须放置在从0地址开始,连续8X4字节的空间内。
每当一个中断发生以后,ARM处理器便强制把PC指针置为向量表中对应中断类型的地址值。因为每个中断只占据向量表中1个字的存储空间,只能放置一条ARM指令,使程序跳转到存储器的其他地方,再执行中断处理。
中断向量表的程序实现通常如下表示:
AREA Boot ,CODE, READONLY
ENTRY
B ResetHandler
B UndefHandler
B SWIHandler
B PreAbortHandler
B DataAbortHandler
B
B IRQHandler
B FIQHandler
其中关键字ENTRY是指定编译器保留这段代码,因为编译器可能会认为这是一段亢余代码而加以优化。链接的时候要确保这段代码被链接在0地址处,并且作为整个程序的入口。
2. 初始化存储器系统
(1)存储器类型和时序配置
通常Flash和SRAM同属于静态存储器类型,可以合用同一个存储器端口;而DRAM因为有动态刷新和地址线复用等特性,通常配有专用的存储器端口。
存储器端口的接口时序优化是非常重要的,这会影响到整个系统的性能。因为一般系统运行的速度瓶颈都存在于存储器访问,所以存储器访问时序应尽可能的快;而同时又要考虑到由此带来的稳定性问题。
(2)存储器地址分布
一种典型的情况是启动ROM的地址重映射。
3. 初始化堆栈
因为ARM有7种执行状态,每一种状态的堆栈指针寄存器(SP)都是独立的。因此,对程序中需要用到的每一种模式都要给SP定义一个堆栈地址。方法是改变状态寄存器内的状态位,使处理器切换到不同的状态,让后给SP赋值。注意:不要切换到User模式进行User模式的堆栈设置,因为进入User模式后就不能再操作CPSR回到别的模式了,可能会对接下去的程序执行造成影响。
这是一段堆栈初始化的代码示例,其中只定义了三种模式的SP指针:
MRS R0,CPSR
BIC R0,R0,#MODEMASK 安全起见,屏蔽模式位以外的其他位
ORR R1,R0,#IRQMODE
MSR CPSR_cxfs,R1
LDR SP,=UndefStack
ORR R1,R0,#FIQMODE
MSR CPSR_cxsf,R1
LDR SP,=FIQStack
ORR R1,R0,#SVCMODE
MSR CPSR_cxsf,R1
LDR SP,=SVCStack
4. 初始化有特殊要求的端口,设备
5. 初始化应用程序执行环境
映像一开始总是存储在ROM/Flash里面的,其RO部分即可以在ROM/Flash里面执行,也可以转移到速度更快的RAM中执行;而RW和ZI这两部分是必须转移到可写的RAM里去。所谓应用程序执行环境的初始化,就是完成必要的从ROM到RAM的数据传输和内容清零。
下面是在ADS下,一种常用存储器模型的直接实现:
LDR r0,=|Image$$RO$$Limit| 得到RW数据源的起始地址
LDR r1,=|Image$$RW$$Base| RW区在RAM里的执行区起始地址
LDR r2,=|Image$$ZI$$Base| ZI区在RAM里面的起始地址
CMP r0,r1 比较它们是否相等
BEQ %F1
0 CMP r1,r3
LDRCC r2,[r0],#4
STRCC r2,[r1],#4
BCC %B0
1 LDR r1,=|Image$$ZI$$Limit|
MOV r2,#0
2 CMP r3,r1
STRCC r2,[r3],#4
BCC %B2
程序实现了RW数据的拷贝和ZI区域的清零功能。其中引用到的4个符号是由链接器第一输出的。
|Image$$RO$$Limit|:表示RO区末地址后面的地址,即RW数据源的起始地址
|Image$$RW$$Base|:RW区在RAM里的执行区起始地址,也就是编译器选项RW_Base指定的地址
|Image$$ZI$$Base|:ZI区在RAM里面的起始地址
|Image$$ZI$$Limit|:ZI区在RAM里面的结束地址后面的一个地址
程序先把ROM里|Image$$RO$$Limt|开始的RW初始数据拷贝到RAM里面|Image$$RW$$Base|开始的地址,当RAM这边的目标地址到达|Image$$ZI$$Base|后就表示RW区的结束和ZI区的开始,接下去就对这片ZI区进行清零操作,直到遇到结束地址|Image$$ZI$$Limit|
6. 改变处理器模式
因为在初始化过程中,许多操作需要在特权模式下才能进行(比如对CPSR的修改),所以要特别注意不能过早的进入用户模式。
内核级的中断使能也可以考虑在这一步进行。如果系统中另外存在一个专门的中断控制器,这么做总是安全的。
7. 呼叫主应用程序
当所有的系统初始化工作完成之后,就需要把程序流程转入主应用程序。最简单的一种情况是:
IMPORT main
B main
直接从启动代码跳转到应用程序的主函数入口,当然主函数名字可以由用户随便定义。
在ARM ADS环境中,还另外提供了一套系统级的呼叫机制。
IMPORT __main
B __main
__main()是编译系统提供的一个函数,负责完成库函数的初始化和初始化应用程序执行环境,最后自动跳转到main()函数。
* 文件 : 连载二
* 版本 : V1.00
* 作者 : 潘自强
*
* 对象 : ARM7
* 模式 : ARM
* 工具 : ADS1.20
*********************************************************************************************************
*/
4 描述文件
要编写描述文件,必须知道ARM Image文件的组成及ARM Image文件执行的机理。
4.1 ARM Image的结构
一个ARM Image structure由linker在以下几个方面定义:
? 组成它的regions 和 output sections
? 当Image 下载的时候这些regions 和 sections 在内存中的位置
? 当Image 执行时这些regions和sections在内存中的位置
4.1.1 ARM Image的组成
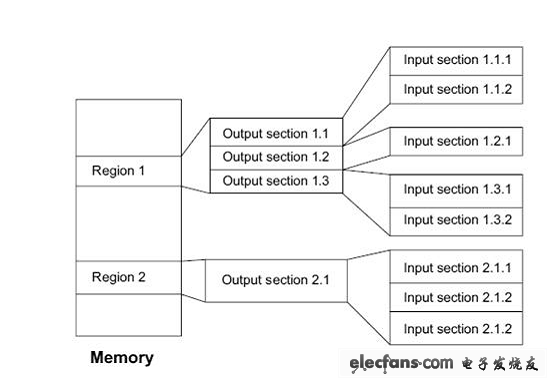
一个ARM Image被保存在可执行文件当中,它的层次结构可以包括Image,regions,output sections和input sections。
? 一个Image由一个或多个regions组成,每个region包括一个或多个output sections
? 每个output section由一个或多个input sections组成
? Input sections是一个object file中的code和data信息。
Image的结构如
下图:
1 附图: tu1.JPG (24684 字节)
NOTE Input section,output section和region的定义见ADS_LinkerGuide 3-3页。
同时Input section 有几种属性,分别为readonly,read-write,zero-initialized。分别称为RO,RW和ZI。属性来源于AREA后的attr属性。
比如CODE是RO,DATA是RW,NOINT默认为ZI,即用0值初始化,但是可以选择不进行0值初始化。ZI属性仅仅来源于SPACE, DCB, DCD, DCDU, DCQ, DCQU, DCW, 或者DCWU。由以上定义,ZI属性的包含于RW属性,它是有初始值的RW数据。又例如在C语言中,代码为RO,静态变量和全局变量是RW,ZI的。
文件 : 连载三
* 版本 : V1.00
* 作者 : 潘自强
*
* 对象 : ARM7
* 模式 : ARM
* 工具 : ADS1.20
*********************************************************************************************************
*/
4.1.2 Image 的Load view 和 execution view
在下载的时候Image regions被放置在memory map当中,而在执行Image前,或许你需要将一些regions放置在它们执行时的地址上,并建立起ZI regions。例如,你初始化的RW数据需要从它在下载时的在ROM中的地址处移动到执行时RAM的地址处。
1 附图: tu2.jpg (640566 字节)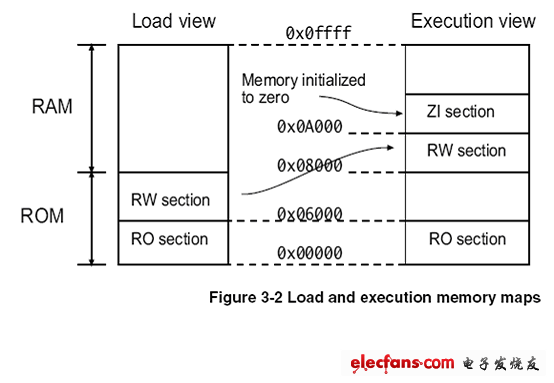
NOTE Load view 和execution view的详细定义见ADS_LinkerGuide 3-4
以上的描述包括二个内容,一是要指定各个section在load view和execution view时的地址即memory map,二是要在执行前根据这些地址进行section的初始化。
4.1.3 制定Memory map
制定memory map的方法基本上有二种,一是在link时使用命令行选项,并在程序执行前利用linker pre-define symbol使用汇编语言制定section的段初始化,二是使用scatter file。以上二种方法依应用程序的复杂度而定,一针对简单的情况,二针对复杂的情况。
* 文件 : 连载四
* 版本 : V1.00
* 作者 : 潘自强
*
* 对象 : ARM7
* 模式 : ARM
* 工具 : ADS1.20
******************************************************************************
***************************
*/
4.1.1.1 利用linker pre-define symbol使用汇编程序
这是简单的方法,针对简单的memory map。在link时使用选项-ro, -rw, 等等指定memory map的地址。详细说明参看ADS_LinkerGuide中命令行选项说明。然后利用汇编使用pre-define symbol,来进行各种段的定位。Linker pre-define定义如下:
1 附图: tu1.jpg (22811 字节)
由前面对ZI的说明,Image$$RW$$Limit = Image$$ZI$$Limit。
2 附图: tu2.jpg (30577 字节)
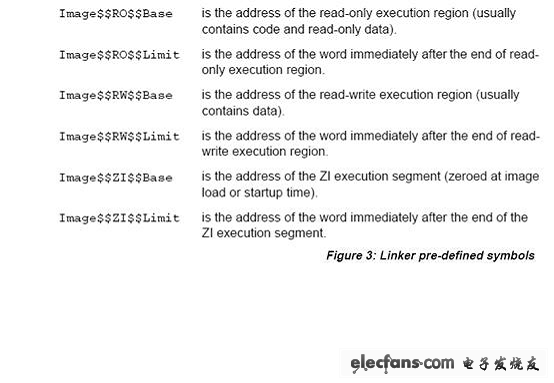
这些都是linker预先定义的外部变量,在使用的时候可以用IMPORT引入。下面给出一个例子。
假设linker 选项为:-ro-base 0x40000000 -rw-base 0x40003000。程序和只读变量(const 变量)大小为0x84,这样RO section的大小为0x84 bytes。Data的大小为0x04 bytes,并且data被初始化,则RW section的大小为0x04,ZI section的大小为0x04。这样程序
在load view,地址是这样的:
0x40000000开始到地址0x40000080,是RO section部分(程序从0x40000000开始),Image$$RO$$Limit = 0x40000084.
0x40000084地址开始到地址0x40000084,是RW section部分。
在execution view,由linker的选项,各个section的地址是这样的:
RO section的地址不变。
RW section的起始地址应当为0x40003000,则Image$$RW$$Base = 0x40003000。
因为全部的0x04 bytes data被初始化,所以Image$$RW$$Limit = Image$$ZI$$Limt = 0x40003004。
现在要做的就是将RW section移到以0x40003000开始的地方,并且创造一个ZI section。
一个更通用的做法是:
首先比较Image$$RO$$Limit和mage$$RW$$Base,如果相等,说明execution view下RW section的地址和load view 下RW section的地址相同,这样,不需要移动RW section;如果不等,说明需要移动RW section 到它在execution view中的地方。然后将Image$$ZI$$Base地址到Image$$ZI$$Limt地址的内容清零。
示例代码如下:
;读入linker pre-define symbols
IMPORT |Image$$RO$$Limit|
IMPORT |Image$$RW$$Base|
IMPORT |Image$$ZI$$Base|
IMPORT |Image$$ZI$$Limit|
; 一些其他的代码或伪指令
;R0读入section load address
LDR R0,=|Image$$RO$$Limit|
;R1读入section execution address
LDR R1,=|Image$$RW$$Base|
;R2读入execution section 后的紧跟的word address
LDR R2,=|Image$$ZI$$Base|
;检查RW section的地址在load view和execution view下
;是否相等,如果相等,就不移动RW section,直接建立
;ZI scetion
CMP R0,R1
BEQ do_zi_init
;否则就copy RW section到execution view下指定的地址
BL copy
; ......
; ......
;copy 是一个用于copy的子函数,它把从R0中的地址开始的
;section copy到R1中的地址开始的section,这个section的
;上限地址后紧跟的word address保存在R2中
copy
CMP R1,R2
LDRCC R3,[R0],#4
STRCC R3,[R1],#4
BCC copy
MOV PC,LR
; ......
; ......
;do_zi_int子函数是为创建ZI section做一些准备工作
do_zi_int
;将ZI section开始的地址装入R1
LDR R1,=|Image$$ZI$$Base|
;将ZI section结束后紧跟的word address装入R2
LDR R2,=|Image$$ZI$$Limit|
;将ZI section 需要的初始化量装入R3
MOV R3,#0
BL zi_int
; ......
; ......
;zi_int子函数用于建立并初始化ZI section,ZI section的
;开始地址储存在R1,ZI section结束后紧跟的word address
;地址储存在R2
zi_int
CMP R1,R2
STRCC R3,[R1],#4
BCC zi_int
MOV PC,LR
; ......
; ......
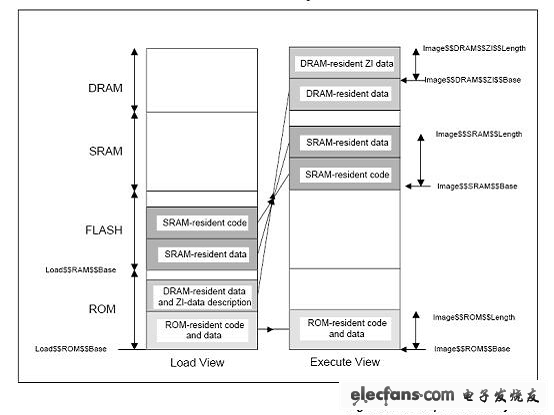
这个方法针对比较简单的应用,如果需要进行一个比较复杂的memory map,如下图,那么这个方法就不适用了。为了解决复杂memory map的问题
需要用到scatter load 机制。
3 附图: tu3.jpg (32473 字节)
好东西啊
不错
贡献!
学习中...
看看,还不错
这个好东西!
ARM启动代码详细解说
好
好~~~~~~~~~~~~~~长
哇
谢谢小编分享!~~
下载看看,学习一下
GPIO_LOCK_M
保存了好好看看
谢谢小编的分享